Extracto
DISEÑO ELECTRONICO ANALOGO
2
OBJETIVO TERMINAL DEL CURSO
Analizar, Interpretar, diseñar, desarrollar, construir y comprobar circuitos análogos con
base en componentes discretos y/o integrados argumentando los conceptos técnicos
correspondientes para cada caso, según especificaciones dadas, que permitan al alumno
realizar aplicaciones análogas, de interfaces y de conmutación en potencia.
Desarrollar, construir y comprobar circuitos análogos con amplificadores operacionales,
argumentará sus aplicaciones, y su desempeño tanto en el dominio del tiempo como en
frecuencia.
Implementar circuitos que efectúen operaciones sobre señales eléctricas generadas por
sensores y adecuarlas para su uso en sistemas de control, monitoreo y verificación.
Diseñar sistemas análogos que interactúen con sistemas electrónicos digitales para la
manipulación y procesamiento de datos.
BREVE DESCRIPCIÓN
El desarrollo de la electrónica, se ha constituido en uno de los más grandes sucesos de la
época moderna y ha sido fundamental para los grandes adelantos tecnológicos, en casi
todos los campos del saber. La Ingenierías Eléctrica y Electrónica se preocupan por todos
los fenómenos físicos asociados con la carga y su movimiento, y para ello emplea dos
modelos, la teoría electromagnética y la teoría de circuitos, estudios que se convierten en
la base de todo lo que involucre la transformación de cualquier tipo de energía eléctrica y
viceversa.
Actualmente, aunque la mayoría de sistemas electrónicos son digitales, estos poseen una
parte análoga como interacción con el mundo externo a través de una interfaz de tipo
analógico.
La mayoría de los diseños actuales de circuitos análogos y de señal mixta son realizados
en procesos de substrato en CMOS, usando dispositivos de enriquecimiento que poseen
muy poca interacción con los MOSFET usados en el diseño de circuitos digitales.
DISEÑO ELECTRONICO ANALOGO
3
TABLA DE CONTENIDO
OBJETIVO TERMINAL DEL CURSO
2
BREVE DESCRIPCIÓN
2
PRESENTACIÓN
7
INTRODUCCIÓN:
8
Nacimiento de la electrónica:
8
Desarrollo de la Radio.
9
Desarrollo de la Televisión.
10
Integración de chips, computadoras...
10
Desarrollo de la electrónica en el mundo.
11
I.
DISPOSITIVOS SEMICONDUCTORES
12
1. TEORÍA BANDAS. CONDUCTORES Y AISLANTES.
14
2. SEMICONDUCTORES. ELECTRONES Y HUECOS.
15
2.1 Semiconductores intrínsecos.
15
2.2 Semiconductores extrínsecos
17
2.3 Semiconductores dopados
17
2.3.1 Semiconductores tipos N.
18
2.3.2 Semiconductores tipos P.
20
OBSERVACIONES
22
3. DISTRIBUCIÓN ENERGÉTICA DE LOS ELECTRONES.
23
4. DENSIDAD DE ESTADOS EN LAS BANDAS.
23
5. PROBABILIDAD DE OCUPACIÓN
24
6. LOCALIZACIÓN DEL NIVEL DE FERMI.
26
7. LA UNIÓN N-P.
28
8. EL DIODO DE UNIÓN.
31
8.1 Limitaciones de los diodos reales.
34
Rectificación de media onda y rectificación de onda completa.
35
Características de un Diodo:
38
PRACTICA 1 CIRCUITOS RESISTIVOS
49
PRACTICA 2 CARGA Y DESCARGA DE UN CONDENSADOR
50
PRACTICA 3 MANEJO DE OSCILOSCOPIO ANÁLOGO
51
PRACTICA 4 MEDIDAS CON EL OSCILOSCOPIO ANÁLOGO
52
PRACTICA 5 CORRIENTE ALTERNA
53
PRÁCTICA 6 CURVA CARACTERÍSTICA DEL DIODO
54
PRÁCTICA 7 RECTIFICACIÓN
55
PRACTICA 8 RECORTADOR ZENER
56
PRACTICA 9 FILTRADO Y RIZADO
57
PRÁCTICA 10 RECTIFICACIÓN DE POTENCIA
58
9. EL TRANSISTOR DE UNIÓN (BJT).
59
9.1 TRANSISTOR COMO INTERRUPTOR
61
DISEÑO ELECTRONICO ANALOGO
4
9.2 TRANSISTOR COMO RESISTENCIA VARIABLE
62
9.3 PRINCIPIO DE OPERACION
63
9.3.1 REGION DE CORTE
63
9.3.2 REGION ACTIVA NORMAL
66
9.3.3 REGION DE SATURACION
72
9.4.1 CARACTERISTICA VBE-IB
75
9.4.2 CARACTERISTICA VCE-IC
75
9.4.3 PRINCIPALES PARAMETROS COMERCIALES
76
9.5 MODELOS DELTRANSISTOR BIPOLAR
77
9.5.1 MODELO DE EBERS-MOLL
77
9.5.2 APLICACION DEL MODELO DE EBERS-MOLL A LA REGION ACTIVA NORMAL
79
PRÁCTICA 11 POLARIZACION DEL TRANSISTOR BIPOLAR
113
PRACTICA 12 TRANSISTOR EN CONMUTACIÓN
114
PRÁCTICA 13 AMPLIFICADOR CON BJT
115
10. LOS TRANSISTORES DE EFECTO DE CAMPO
116
10.1 TRANSISTOR DE EFECTO DE CAMPO DE UNION (JFET)
116
10.1.1 PRINCIPIO DE OPERACION DEL NJFET
117
1.1.1 Región de corte
117
10.2 TRANSISTOR MOSFET
125
10.3 APLICACIONES DE LOS TRANSISTORES DE EFECTO DE CAMPO
135
10.4 TALLER
140
II.
EL AMPLIFICADOR OPERACIONAL
150
1. CONCEPTOS BÁSICOS SOBRE LOS AMPLIFICADORES
151
2.
MODO INVERSOR
176
3.
MODO NO INVERSOR
177
4.
SEGUIDOR DE TENSION
179
5.
AMPLIFICADOR COMO SUMADOR
180
6.
AMPLIFICADOR COMO INTEGRADOR
181
7.
CIRCUITO DIFERENCIADOR
182
8.
AMPLIFICADOR DIFERENCIAL
184
9.
AMPLIFICADORES DE INSTRUMENTACIÓN
186
10.
AMPLIFICADOR DE CARGA
189
11.
AMPLIFICADOR DE AISLAMIENTO
190
12.
SELECCIÓN DEL AMPLIFICADOR OPERACIONAL ADECUADO
191
13.
TALLER
191
14. FILTROS ACTIVOS
197
DISEÑO DE FILTROS
203
15.
CONVERTIDORES DE FRECUENCIA A VOLTAJE
206
DISEÑO ELECTRONICO ANALOGO
5
16.
CLASES DE FUENTES
206
17. CONEXIÓN DE SEÑALES Y FUENTES DE SEÑAL PARA INTERFACES Y ADQUISICIÓN DE
DATOS
208
18.
CONCLUSIONES
213
III. CIRCUITOS OSCILADORES
217
OSCILADORES COLPITTS Y HARTLEY:
217
OSCILADOR DE TRANSISTORES ACOPLADOS:
219
OTRO CONCEPTO DEL OSCILADOR:
221
OSCILADOR SIMÉTRICO CON COMPUERTAS NOT:
225
DISPARADORES SCHMITT TRIGGER
226
OSCILADOR DE CRISTAL
227
OSCILADORES CONTROLADOS
229
CIRCUITO INTEGRADO 555
229
CI 555 COMO MULTIVIBRADOR ASTABLE:
231
CI 555 COMO MULTIVIBRADOR MONOESTABLE:
231
CIRCUITOS MONOESTABLES:
232
PRACTICA 14 CIRCUITOS CON AMPLIFICADOR OPERACIONAL
234
PRÁCTICA 15 ASTABLE Y MONOESTABLE CON 555
235
PRACTICA 16 MULTIVIBRADOR ASTABLE
236
BIBLIOGRAFIA
237
APENDICE 1: EL CONDENSADOR
238
Comportamientos ideal y real
239
Comportamiento en corriente continua:
240
Comportamiento en corriente alterna:
240
Asociaciones de condensadores
242
Aplicaciones típicas
243
DISEÑO ELECTRONICO ANALOGO
6
Condensadores variables
243
APENDICE 2 EL INDUCTOR
244
Construcción:
244
Energía almacenada:
244
Fuerza electromotriz autoinducida:
244
Comportamientos ideal y real
245
Comportamiento en corriente continua
246
Comportamiento en corriente alterna
246
Asociaciones comunes
248
APENDICE 3 IMPEDANCIA
250
Impedancia de un circuito serie
250
Resolución del circuito serie de CA
251
APENDICE 4 SEÑALES ELECTRICAS
253
FUNCION ESCALON UNITARIO
253
LA FUNCION EXPONENCIAL
256
FUNCION SENOIDAL O SINUSIODAL
258
DISEÑO ELECTRONICO ANALOGO
7
PRESENTACIÓN
Aunque la mayoría de sistemas electrónicos son digitales, estos poseen una parte análoga como
interacción con el mundo externo a través de una interfaz de tipo analógico, los cuales se emplean en
productos electrónicos como videojuegos, hornos de microondas, sistemas de control para
automóviles, dispositivos biomédicos, entre otros; también los podemos encontrar equipos de prueba
como medidores, generadores y osciloscopios, dispositivos de telecomunicación y consumo masivo
como los celulares, radios, televisores y computadores personales.
El papel o finalidad de la Educación es generar valores y conocimientos que permitan convertir a
todos los individuos en seres capaces de pensar, sentir, realizar, generar e innovar, para contribuir al
mejoramiento y beneficio de la sociedad a la cuál pertenecen.
La Educación abierta o a distancia apoyada en tecnología no se debe limitar al conocimiento, debe
asumir el reto de desarrollar las herramientas necesarias que le permitan al estudiante ser un
participante activo de su proceso de aprendizaje, éste debe ser inquieto, preguntón crítico y motivarse
cada vez más en lo que aprende de su profesor y motivar en él un sentimiento investigativo e
innovador.
El enfoque de este tipo de Educación está orientado al estudiante, quién es el directo responsable de
su proceso de aprendizaje, por lo tanto, para el desarrollo de este curso se implementa un modelo
pedagógico y andragógico de aprendizaje interactivo virtual con el apoyo técnico necesario que
apoye la Psicología de Aprendizaje, haciendo énfasis en sus tres elementos: Perdurabilidad,
Transparencia y Habilidad Práctica. Esto permitirá contrarrestar las desventajas que se presentan en
la Educación virtual como son la desmotivación y deserción del estudiante por la lentitud del proceso
y por la reducción de la interacción personal.
Para lograr aprendizajes sistémicos en la educación, es necesario avanzar hacia un modelo de
pedagogía y andragogía que se identifique con los aspectos sociales que se espera, impacten, para
lograr así, una transformación de la realidad a través de la educación.
El presente curso ha sido elaborado a partir de mi experiencia docente y profesional aplicada en la
Universidad Autónoma de Manizales, Universidad de Caldas, Universidad Antonio Nariño e
INGECOMPUTO.
El Curso Diseño Electrónico Análogo brindará a los estudiantes los conceptos y técnicas empleadas
para Analizar, Modelar y sintetizar dispositivos, circuitos y sistemas electrónicos análogos,
Implementar circuitos que efectúen operaciones sobre señales eléctricas generadas por sensores y
adecuarlas para su uso en sistemas de control, monitoreo y verificación, Diseñar sistemas análogos
que interactúen con sistemas electrónicos digitales para la manipulación y procesamiento de datos, a
través de ejercicios de aplicación para afianzar los conceptos vistos, y el aprendizaje significativo,
facilitando transferir los conocimientos adquiridos a otros contextos de su quehacer profesional.
Dedico este trabajo a mi bella esposa Kathy Faridy, a mi bebé por nacer y demás miembros de
mi familia y en especial a la memoria de mi tío José Hernán Espinosa Martínez quien fue un
padre para mí (mi mentor) y le debo lo que soy hoy día "que la luz de su alma nos siga guiando
por el camino de la vida".
Rubén Darío
DISEÑO ELECTRONICO ANALOGO
8
INTRODUCCIÓN:
Gracias a la electrónica se llevaron a cabo los descubrimientos científicos que tuvieron inmediata
aplicación práctica y viceversa, las aplicaciones prácticas fomentaron la investigación científica para
resolver diferentes problemas, lo cual a su vez abrió nuevos horizontes científicos. Se reseña la
curiosidad científica que ha tenido el hombre desde tiempos inmemoriales por las propiedades de la
electricidad. El conocimiento científico de la electricidad dio lugar, inmediatamente, a aplicaciones
tecnológicas importantes. Éstas incluyen al telégrafo, con el que el hombre pudo comunicarse por
medios eléctricos, y a las máquinas eléctricas, o sea, motores eléctricos y generadores de
electricidad. De esta forma, el hombre tuvo a su disposición fuentes de corriente eléctrica de gran
intensidad, hecho que cambió drásticamente la vida, dando lugar a una revolución en la forma de vida
de la humanidad, cuyas consecuencias fueron la iluminación eléctrica y el teléfono, entre otras.
Nacimiento de la electrónica:
Como hacia el fin de siglo XIX ya se había inventado el micrófono, que transforma una señal acústica
en una eléctrica. Por otro lado, ya se había inventado el audífono, aparato que transforma una señal
eléctrica en una acústica. En este sistema las voces se distorsionaban mucho, la energía con que se
emitía la onda era muy pequeña. Además, el hecho de que la fracción de energía que llegaba al
receptor era muy pequeña, hacía difícil su funcionamiento para distancias grandes. La solución más
satisfactoria fue lograda una vez que se inventó el tubo al vacío.
Desde el siglo XVIII algunos investigadores habían descubierto que si se calienta una superficie
metálica, ésta emite cargas eléctricas. Sin embargo, fue Thomas A. Edison quien volvió a
"desenterrar" este efecto en 1883, cuando trataba de mejorar su lámpara incandescente. Este efecto,
que se llamó "efecto Edison", también recibe el nombre de termiónico. Fue el mismo Edison quien
inventó un dispositivo en el cual la carga eléctrica emitida por la superficie metálica caliente (llamada
cátodo) es recogida por otra superficie fría (llamada ánodo), lográndose de esta forma una corriente
eléctrica. En la figura 1 se muestra cómo Edison construyó su dispositivo. Edison encerró los dos
electrodos, el ánodo y el cátodo, dentro de un tubo de vidrio al vacío que también utilizaba para
elaborar sus lámparas de iluminación.
Por otro lado, en el año de 1897 el físico inglés J. J. Thomson (1856-1940) descubrió la existencia de
una partícula eléctricamente cargada, el electrón. Thomson demostró experimentalmente que el
electrón tenía carga eléctrica negativa. En el año de 1906 Thomson recibió el Premio Nobel de Física
por su descubrimiento.
En 1899 J.J. Thomson estableció que las cargas que se liberaban al calentar la superficie metálica
eran electrones.
En 1903 el físico británico John Ambrose Fleming (1849-1945) fue el primero en encontrar una
aplicación práctica del efecto Edison. Fleming era asesor de una compañía telegráfica y le habían
encomendado la tarea de encontrar un mejor detector de ondas electromagnéticas. L a compañía
utilizó como detector de ondas un cohesor, no muy eficaz. A partir de 1900, en algunos diseños de
receptores, se usaban cristales de galena o de pirita de hierro como detectores que por cierto fueron
las primeras componentes de estado sólido empleadas en electrónica. Fleming recordó su trabajo
anterior sobre el efecto Edison, y encontró una solución en este tipo de lámpara eléctrica.
El avance más importante en el desarrollo de la electrónica fue dado por el físico estadounidense Lee
de Forest (1873-1961), en 1906, al introducir en el tubo al vacío un tercer electrodo reticulado,
llamado rejilla, que permite el paso de electrones. Esta rejilla se coloca entre el cátodo y el ánodo,
como se ve en la figura 2. De Forest llamó a su dispositivo audión, aunque más tarde se le llamó
DISEÑO ELECTRONICO ANALOGO
9
tríodo. Tuvo que trabajar con diferentes dispositivos antes de conseguir el tríodo. El tríodo lo hace
incorporar la señal y amplificar su intensidad.
A partir de 1907, hasta 1912, De Forest trabajó en el diseño de un sistema de radio, muy rústico, el
cual trató de vender a los aficionados de la radio y a las fuerzas armadas. También formó una
compañía para poder competir con la ATT en comunicaciones de larga distancia. Su radio podía
transmitir y recibir voces, pero no pudo conseguir que sus triodos amplificaran en forma confiable.
Hacia 1912 De Forest había alcanzado cierto control en el comportamiento del tríodo. Redujo la
amplificación(el voltaje de la batería del ánodo). Esta reducción la compensó conectando varios
triodos.
Así construyó un amplificador, De Forest propuso su venta a la ATT. Cuando De Forest hizo la
demostración de su amplificador a la ATT en octubre de 1912, los físicos de la empresa, Harold D.
Arnold, Frank Jewett y Edwin Colpitts inmediatamente se percataron de que ese sistema era lo que
buscaban.
Dirigido por Arnold, la ATT inició un proyecto de investigación para entender y dominar los principios
físicos del funcionamiento del tríodo y así poder construirlo eficazmente. En el transcurso de dos años
Arnold y un grupo de 25 investigadores y asistentes de la ATT transformaron el débil y no muy
confiable audión, en un amplificador muy potente y seguro. El tríodo así mejorado hizo posible que el
servicio telefónico abarcara de costa a costa a Estados Unidos.
Otras compañías hicieron progresos significativos y la electrónica con tubos al vacío se desarrolló de
manera impresionante de 1912 a 1932.
Durante la primera Guerra Mundial se usó mucho la radio y se construyeron tubos al vacío en
grandes cantidades. Se utilizaron en 1915, en la radiotelefonía trasatlántica, para comunicar a Francia
y Estados Unidos.
A principios de la década de 1930 se construyeron tubos al vacío con más elementos entre el cátodo
y el ánodo; éstos fueron el tetrodo, el pentodo.
Desarrollo de la Radio.
Un elemento crucial para el desarrollo de la radio fue el oscilador. Este circuito fue inventado en 1913
por el físico estadounidense Edwin Howard Armstrong (1890-1954). Es un circuito basado en un
tríodo, de cuya salida se toma una parte de la corriente que se vuelve a alimentar a la entrada del
tríodo, formando un circuito de retroalimentación. El primer programa público de radio fue emitido en
Inglaterra el 23 de febrero de 1920. Así nació radio.
En 1933 Armstrong inventó otro tipo de emisión de señales de radio: el de frecuencia modulada (FM).
La transmisión por FM, iniciada comercialmente en Estados Unidos en febrero de 1941, comparada
con la amplitud modulada (AM), tiene la ventaja de que sus transmisiones no se alteran con las
perturbaciones, ya sean atmosféricas o producidas por el hombre, que afectan la amplitud de la onda
pero no su frecuencia. En el sistema de FM no se presenta el llamado fenómeno de "estática", que es
un ruido sistemático que se oye en emisiones de AM.
La radio como la conocemos en la actualidad fue la creación de tres hombres: Lee de Forest,
autonombrado "padre de la radio", cuya invención del tríodo hizo posible el nacimiento de la
electrónica moderna; Edwin Howard Armstrong, inventor del circuito retroalimentador (y del oscilador)
así como de la frecuencia modulada, que forman la base de la transmisión y recepción de los
sistemas actuales de radio (y de televisión); finalmente, David Sarnoff, quien encabezó la Radio
Corporation of America (RCA).
DISEÑO ELECTRONICO ANALOGO
10
Desarrollo de la Televisión.
Hace alrededor de un siglo, varias personas empezaron a considerar la posibilidad de enviar
imágenes por medios eléctricos (o sea, lo que hoy en día hace la televisión). En 1884, el alemán Paúl
Nipkow solicitó una patente para un sistema de televisión que él denominó "telescopio eléctrico". Este
rústico aparato era dispositivo electromecánico que utilizaba una fotocelda para transformar luz en
corriente eléctrica. La imagen no reproducía los detalles finos. Variaciones de este se diseñaron
hasta 1930 sin que realmente tuviesen éxito.
En una reunión de la Sociedad Roentgen, efectuada en Inglaterra en 1911, el ingeniero eléctrico A. A.
Campbell Swinton presentó un esquema de sistema de televisión, que es el que se usa en la
actualidad. La escena que se desea transmitir se enfocaría sobre una placa hecha de material no
conductor de electricidad, por ejemplo de mica, la cual se encuentra dentro de un tubo de rayos
catódicos. Este tubo fue inventado a mediados del siglo XIX por William Crookes para estudiar las
propiedades de las corrientes eléctricas a través de gases. Para el receptor, Campbell Swinton
escogió un tubo de rayos catódicos diseñado en 1897 por Ferdinand Braun, de la Universidad de
Estrasburgo, en ese entonces parte de Alemania. Este tubo, llamado cinescopio, es de vidrio al vacío
y tiene en su fondo una pantalla de material fluorescente, como fósforo, que emite luz cuando un haz
de electrones incide sobre él.
A medida que el haz electrónico barre la superficie de la pantalla, ésta se va iluminando punto por
punto. Esta fue una idea de Campbell Swinton que casi describe la actual tecnología de la televisión.
Campbell Swinton creó el diseño conceptual sobre el cual personas trabajarían. Fue Vladimir
Zworykin (1889-1982), un ingeniero ruso inmigrado a Estados Unidos en 1919 quien construyó la
primera cámara práctica. En 1924 mostró a la compañía Westinghouse una versión primitiva, pero
que funcionaba. Las imágenes eran débiles y vagas, casi sombras. Los directivos de la empresa no
se impresionaron tampoco cuando Zworykin les mostró una versión mejorada en 1929.
A quien sí impresionó Zworykin fue a David Sarnoff, director de otra compañía, la RCA Victor, quien
creía en la promesa comercial de la televisión.
Zworykin fue contratado en 1930 por la RCA como director de investigación electrónica y en 1933
finalmente convenció a Sarnoff de que su cámara, a la que llamó iconoscopio (del griego iekon,
imagen, y skopon, ver), y su cinescopio eran satisfactorios. Campbell Swinton había propuesto que
fueran de rubidio, pero Zworykin descubrió que era mejor cubrir plata con óxido de cesio.
La RCA probó por primera vez un sistema completo en 1933. Transmitió imágenes de 240 líneas a
una distancia de siete kilómetros en Colligswood, Nueva Jersey. Aumentaron el número de líneas;
actualmente se usan 525. En 1938 la RCA tuvo listo un sistema de televisión en funcionamiento. Por
problemas burocráticos el gobierno no aprobó la licencia de funcionamiento hasta julio de 1941.
Durante los años de la segunda Guerra mundial, científicos e ingenieros dirigidos por Zworykin
desarrollaron una cámara 100 veces más sensible que el iconoscopio, al terminar la guerra, la RCA
reinició sus trabajos en el campo de la televisión.
Integración de chips, computadoras...
El transistor, se empezó a utilizar a finales de la década de 1940, se consideró en su época como una
maravilla de lo compacto, comparado con el tamaño de los tubos al vacío. A partir de 1950 el tamaño
de los dispositivos electrónicos se ha reducido. En 1960, se empezó a usar la palabra
microelectrónica, un bloque (chip) de silicio de un área de 0.5 cm² podía contener de 10 a 20
transistores con varios diodos, resistencias y condensadores. Hoy en día tales bloques pueden
contener varias docenas de miles de componentes.
DISEÑO ELECTRONICO ANALOGO
11
A medida que la microtecnología electrónica se desarrolló, se aplicó a computadoras comerciales. Se
diseñaron diferentes dispositivos portátiles como las calculadoras. Cada componente que se usaba
en un circuito electrónico estaba hecho de materiales que tuviesen las características requeridas para
su funcionamiento. Se utilizó el tungsteno para los cátodos de un tubo al vacío, cerámica para
condensadores, carbón para resistencias.
Hacia mediados de la década de 1950 se construyeron circuitos electrónicos en laboratorios
industriales de dos compañías estadounidenses, Texas Instruments y Fairchild Semiconductor. De
esta manera se han construido un sinnúmero de aparatos y dispositivos microelectrónicos que
distinguen la época en que vivimos: relojes de mano, robots, microcomputadoras y otros.
Desarrollo de la electrónica en el mundo.
En computación, el hardware configurable, la computadoras ópticas y la computación molecular. En
las computadoras ópticas haces de luz remplazan a las conexiones metálicas (de cobre). Estas
serán de mayor capacidad, más rápidas, de menor consumo energético y ocuparan menos espacio.
En transporte terrestre, los trenes voladores MAGLEV (Magnetically Levitated Vehicles), los
automóviles eléctricos y electrónicos, y los automóviles inteligentes serán las tecnologías
responsables del desplazamiento rápido y seguro de las personas. Los trenes voladores son
vehículos que corren a velocidades cercanas a los 500 Km/h. Electroimanes de gran potencia se
usan para generar las fuerzas de suspensión, conducción, tracción y frenado del tren. El tren japonés
HSST con suspensión magnética repulsiva, y el Transrapid alemán con suspensión magnética
atractiva, son dos prototipos MAGLEV que en la práctica han demostrado que velocidades cercanas a
los 500 Km/h son posibles.
En los automóviles eléctricos, los motores de combustión son remplazados por motores eléctricos
alimentados por baterías recargables. Estos automóviles eléctricos son más eficientes (en términos
de energía/distancia) y más limpios (no emiten gases contaminantes) que los vehículos con motores
de combustión. Estos surgen como una respuesta necesaria a la contaminación ambiental y al
agotamiento de las reservas mundiales de petróleo.
En los automóviles electrónicos, las conexiones mecánicas son remplazadas por cables eléctricos
que conectan las diferentes partes del vehículo. Los automóviles inteligentes son vehículos capaces
de cooperar con el conductor (copiloto automático) o capaces de asumir todas las funciones del
conductor (piloto automático). Estos vehículos vendrán equipados con sistemas de navegación
basado en satélites (sistemas GPS), con video-cámaras para "ver", con micrófonos para "escuchar" y
con parlantes para "hablar".
Junto con los automóviles inteligentes se tendrán también las pistas inteligentes que se encargan de
conducir vehículos sin la necesidad de un conductor. Las pistas inteligentes se han planteado como
una solución a las insoportables congestiones de tránsito vehicular. El Sistema de Autopistas
Automáticas de Alta Velocidad (Automated Highway System) que se viene desarrollando en
California, EE. UU.
En el campo de las comunicaciones, las redes completamente ópticas se impondrán como la
tecnología más eficiente para transmisiones intensivas en data (voz, fax, video) entre millones de
terminales. En teoría una fibra óptica simple puede transmitir a una velocidad de 100 veces superior a
la velocidad de transmisión en cables de cobre.
La tecnología láser ha evolucionado rápidamente desde su comienzo a mediados de 1950. El
Sistema de Láser Aerotransportado (ABL) y Sistema Láser Basado en el Espacio (SBL) son
DISEÑO ELECTRONICO ANALOGO
12
precursores de una clase enteramente nueva de armamento. El aprovechamiento del láser para la
desviación de escombros en órbita es algo está en investigación.
La desviación con láseres de asteroides, meteoritos, y cometas es probablemente la misión espacial
internacional más importante para nuestro planeta: la Tierra, en el siglo que comienza. La Tierra ha
recibido impactos varias veces en el pasado y recibirá impactos semejantes en el futuro.
Las máquinas inteligentes, los materiales inteligentes y el software inteligente serán una realidad
considerando la gran rapidez que tendrán los futuros microprocesadores. Las máquinas inteligentes
serán capaces de aprender, inferir, pensar, juzgar, memorizar, recordar y mejorar de manera muy
similar a la del ser humano.
Los materiales inteligentes son aquellos capaces de modificar su estructura interna de manera que no
se dañen ante el efecto de sobrecargas (como terremotos).
Se tienen las cámaras y video-cámaras digitales (no más revelado de fotos), las cirugías
laparascópicas computarizadas, los órganos artificiales, los robots que harán actividades del hogar e
industrias.
I. DISPOSITIVOS SEMICONDUCTORES
Un semiconductor es un elemento material cuya conductividad eléctrica puede
considerarse situada entre las de un aislante y la de un conductor, considerados en orden
creciente
Los semiconductores más conocidos son el silicio (Si) y el germanio (Ge). Debido a
que, como veremos más adelante, el comportamiento del silicio es más estable que el
germanio frente a todas las perturbaciones exteriores que pueden variar su respuesta
normal, será el primero (Si) el elemento semiconductor más utilizado en la fabricación de
los componentes electrónicos de estado sólido. A él nos referiremos normalmente,
teniendo en cuenta que el proceso del germanio es absolutamente similar.
Como todos los demás, el átomo de silicio tiene tantas cargas positivas en el núcleo,
como electrones en las órbitas que le rodean. (En el caso del silicio este número es de
14). El interés del semiconductor se centra en su capacidad de dar lugar a la aparición de
una corriente, es decir, que haya un movimiento de electrones. Como es de todos
conocido, un electrón se siente más ligado al núcleo cuanto mayor sea su cercanía entre
ambos. Por tanto los electrones que tienen menor fuerza de atracción por parte del núcleo
y pueden ser liberados de la misma, son los electrones que se encuentran en las órbitas
exteriores. Estos electrones pueden, según lo dicho anteriormente, quedar libres al
inyectarles una pequeña energía. En estos recaerá nuestra atención y es así que en vez
de utilizar el modelo completo del átomo de silicio (figura 1), utilizaremos la representación
simplificada (figura 2) donde se resalta la zona de nuestro interés.
DISEÑO ELECTRONICO ANALOGO
13
La zona sombreada de la figura 2 representa de una
manera simplificada a la zona sombreada de la figura 1
Como se puede apreciar en la figura, los electrones factibles de ser liberados de la
fuerza de atracción del núcleo son cuatro
DISEÑO ELECTRONICO ANALOGO
14
1. TEORÍA BANDAS. CONDUCTORES Y AISLANTES.
En los átomos aislados, es decir, tan alejados de otros que no sea apreciable la
interacción con éstos, los electrones corticales están distribuidos energéticamente según
valores discretos que vienen determinados por las soluciones de la ecuación fundamental
de la Mecánica Cuántica que es la Ecuación de Schrödinger (E.S.) (Schrödinger y
Dirac, Nobel de Física en 1933). A cada electrón cortical corresponden 4 números
denominados números cuánticos: n, l, m
l
, y m
s
. El número cuántico n determina el nivel
energético o lo que es lo mismo su mayor o menor alejamiento del núcleo. La energía de
los electrones es negativa (hay que aportar energía para desligarlos del átomo) y mayor
energía equivale a más alejamiento del núcleo. Así pues, los electrones sólo pueden
poseer unos niveles energéticos determinados, y cualquier otra energía estaría
"prohibida". Este modelo de niveles de energía discretos, está de acuerdo con las
observaciones sobre emisión y absorción de luz en gases incandescentes, donde se
observan espectros discretos.
En un sólido cristalino existe una distribución regular de átomos en el espacio, que
constituye la llamada red cristalina. En algunos sólidos esta distribución regular se
manifiesta macroscópicamente en formas geométricas llamadas cristales, (cuarzo,
diamante,..).
En los sólidos cristalinos, las interacciones entre los átomos de la red hacen que el
problema de la distribución energética de los electrones sea muchísimo más complicado
que en un átomo aislado pero, dentro de los postulados, resulta razonable suponer que
los niveles permitidos al conjunto de electrones del sólido, se acumulan en bandas de
energía separadas unas de otras por intervalos o bandas de energía prohibidas. La
emisión de luz por sólidos incandescentes es un hecho experimental que avala la anterior
hipótesis. Dentro de cada banda permitida los niveles estarían tan próximos entre sí, que
las consideraremos bandas permitidas continuas.
Si suponemos un sólido cristalino a la temperatura de 0 K (situación inalcanzable), los
electrones ocuparían los niveles de energía permitidos más bajos posible. Cabrían dos
posibilidades:
1. La banda permitida de mayor energía está ocupada parcialmente.
2. La banda permitida de mayor energía está totalmente vacía y todas las demás
están llenas.
La banda de mayor energía, tanto si está vacía ó parcialmente llena, se llama banda de
conducción, mientras que la siguiente de menor energía la llamaremos banda de
valencia. En el primer caso, los electrones de la banda de conducción pueden tomar
energía de un campo eléctrico aplicado y pasar a niveles superiores compatibles con el
principio de exclusión de Pauli incrementando su momento cinético. La interacción con
partículas del cristal podrá dar lugar a saltos de energía a la inversa. Esto supone desde
luego el abandono del cero absoluto y la aparición de un desplazamiento de la carga
eléctrica, es decir una corriente. El material por tanto sería un conductor. Tal es el caso de
los metales. En el segundo caso, en las bandas totalmente llena no son posibles las
interacciones que supongan saltos de unos niveles a otros, según el principio de
exclusión. Las interacciones posibles implicarían saltos a la banda de conducción (que
está totalmente vacía), pero la cantidad de energía necesaria sería muy grande y el
DISEÑO ELECTRONICO ANALOGO
15
proceso no puede darse cerca del cero absoluto. Por lo tanto, a bajas temperaturas, el
material tiene un comportamiento de aislante. Es el caso de los materiales no metálicos
con enlaces cristalinos covalentes.
La distinción clara entre metales y no metales a bajas temperaturas desaparece cuando
nos alejamos del cero absoluto. En efecto, la agitación térmica permite los saltos desde la
banda de valencia a la de conducción, con lo que ésta aparece parcialmente ocupada
como en los metales.
En los metales a temperaturas de trabajo, un aumento de la temperatura se traduce en un
aumento de la agitación térmica, lo que a su vez produce una mayor frecuencia de las
interacciones entre electrones y partículas y por consiguiente, una disminución del
recorrido medio de los electrones entre choques, una disminución de la velocidad media
de los mismos y finalmente una disminución de la conductividad.
En los materiales cristalinos no metálicos, un incremento de la temperatura aumenta la
probabilidad de saltos desde la banda de valencia a la de conducción. Al quedar ambas
parcialmente ocupadas, ya son posibles los intercambios de energía entre niveles de la
misma banda. A la vez aumenta la agitación térmica como en los metales. Se trata de los
mecanismos opuestos y no se puede afirmar si la conductividad aumentará o disminuirá.
De hecho puede ocurrir lo uno por otro, según el orden de magnitud de la temperatura.
En los metales, los electrones que ocupan la banda de conducción son los electrones no
ligados a átomos individuales y constituyen lo que suele denominarse gas de Fermi. La
imagen no cuántica (clásica) sería la de una especie de plasma de electrones en el que
están inmersos los átomos ionizados (enlaces metálicos). El resto de los electrones
ligados a átomos individuales ocuparían las bandas inferiores (totalmente llenas).
2. SEMICONDUCTORES. ELECTRONES Y HUECOS.
2.1 Semiconductores intrínsecos.
El semiconductor más importante es sin duda el silicio (Si)
de número atómico 14 y perteneciente al grupo IV-A de la
clasificación periódica, grupo al que también pertenecen el
carbono (C, número atómico 6) y el germanio (Ge, número
atómico 32). Los elementos de este grupo se caracterizan
por poseer en la última capa cuatro electrones. Cristalizan
todos ellos en el mismo sistema y la celda y unitaria es un
tetraedro regular con un electrones cada vértice y uno más
en el centro. El enlace covalente consiste en la compartición
de los cuatro electrones de valencia de cada átomo con los
cuatro átomos contiguos para simular así una estructura con ocho electrones en la capa
más externa, que corresponde a un estado cristalino de gran estabilidad.
La anchura de la banda prohibida es muy diferente para estos tres materiales. Para el
carbono (estructura diamante) es de unos 13 eV, la del silencio es de 1,1 eV
aproximadamente y la del germanio 0.7 eV. La del carbono resulta tan grande que la
probabilidad de saltos entre banda de valencia y banda de conducción es prácticamente
nula y el material es un aislante. Para el germanio y silicio el valor es tal que la
DISEÑO ELECTRONICO ANALOGO
16
probabilidad no es nula y además depende fuertemente de la temperatura. Por ello estos
dos materiales que forman parte del grupo de los llamados semiconductores.
Como hemos visto, fuera del cero absoluto, tanto en la banda de conducción como en la
banda de valencia existen electrones y niveles desocupados, por lo que, al aplicar un
campo eléctrico, se puede producir una absorción de energía por parte de los electrones y
por lo tanto un arrastre de los mismos. Hay por lo tanto una corriente eléctrica en la que
intervienen las bandas de conducción y de valencia.
En la banda de conducción el mecanismo es análogo al que se explica la conductividad
de los metales. En la de valencia, el mecanismo puede interpretarse de forma diferente.
Cada nivel desocupado corresponde al abandono de un electrón que ha pasado a la
banda de conducción, o dicho de otra forma, a la rotura de un enlace covalente. Si en la
banda de valencia, un electrón cambia de nivel como consecuencia de su arrastre por un
campo eléctrico, o sea, un electrón de un enlace covalente intacto lo abandona y pasa a
completar otro previamente roto, podríamos describir este mecanismo como si lo que se
desplazara fuese el enlace roto en lugar del electrón. Naturalmente el enlace roto, que
corresponde a un nivel desocupado, se desplaza en sentido contrario a los electrones.
Resulta conveniente considerar al enlace roto como una carga eléctrica móvil, a la que
denominaremos un hueco, e interpretar la corriente eléctrica como formada por dos tipos
de portadores: los electrones de la banda de conducción (cargas móviles negativas) y los
huecos de la banda de valencia (cargas móviles positivas).
Estamos suponiendo un cristal sin impurezas ni
defectos.
Un
semiconductor
así
se
denomina
semiconductor intrínseco. Los portadores de corriente
existen, según lo explicado, por parejas. Estamos
suponiendo que tenemos energía térmica, es decir que
no estamos en el cero grados kelvin. Entonces, un
electrón de la banda de valencia puede incrementar su
energía tomándola de la agitación térmica y pasando a
la banda de conducción donde existen niveles
desocupados. Así se crea una pareja de portadores
electrón-hueco.
Este
mecanismo
se
denomina
generación de pares y naturalmente dependerá de la
temperatura. El proceso inverso, es decir, la pérdida de
energía de un electrón de la banda de conducción
pasando a la de valencia, se puede considerar como la
aniquilación de un par electrón-hueco y se denomina
recombinación de pares. La recombinación es un
mecanismo de tipo estadístico y por lo tanto dependerá
del número de electrones libres y del número de huecos. Generación y recombinación son
mecanismos antagónicos y la densidad de electrones, n, y de huecos, p, en situación de
equilibrio se establecerán cuando las tasas degeneración y recomendación sean iguales.
Llamaremos n
j
al número de pares en un semiconductor intrínseco, naturalmente
dependerá de la temperatura, T, y en este caso se verificará:
n = p = n
j
(T)
DISEÑO ELECTRONICO ANALOGO
17
Material
µµµµ
n
cm
2
.V
-
1
.s
-1
µµµµ
p
cm
2
.V
-
1
.s
-1
(
.cm)
Constante
de red
x 10
-10
m
r
Densidad
(g.cm
-3
)
Temp. de
fusión
ºC
Banda
prohibida
(eV)
Si
1350
480
2.5x10
5
5.43
11.8
2.33
1415
1.11
Ge
3900
1900
43
5.66
16
5.32
936
0.67
2.2 Semiconductores extrínsecos
Los semiconductores reales no son nunca puros sino que tienen impurezas, es decir no
todos los átomos son del elemento base (Si por ejemplo). Sin embargo, se intenta que las
impurezas incontroladas sean sumamente escasas, para lo cual el proceso de fabricación
debe ser extraordinariamente cuidadoso. Por el contrario, se añaden impurezas de
determinado tipo y en proporciones cuidadosamente controladas. Así se tienen dos tipos
de semiconductores impurificados, denominados extrínsecos.
2.3 Semiconductores dopados
Si aplicamos una tensión al cristal de silicio, el positivo de la pila intentará atraer los
electrones y el negativo los huecos favoreciendo así la aparición de una corriente a través
del circuito
Sentido del movimiento de un electrón y un hueco en el silicio
Ahora bien, esta corriente que aparece es de muy pequeño valor, pues son pocos los
electrones que podemos arrancar de los enlaces entre los átomos de silicio. Para
aumentar el valor de dicha corriente tenemos dos posibilidades:
·
Aplicar una tensión de valor superior
·
Introducir previamente en el semiconductor electrones o huecos desde el exterior
DISEÑO ELECTRONICO ANALOGO
18
La primera solución no es factible pues, aún aumentando mucho el valor de la tensión
aplicada, la corriente que aparece no es de suficiente valor. La solución elegida es la
segunda.
En este segundo caso se dice que el semiconductor está dopado.
El dopaje consiste en sustituir algunos átomos de silicio por átomos de otros
elementos. A estos últimos se les conoce con el nombre de impurezas. Dependiendo del
tipo de impureza con el que se dope al semiconductor puro o intrínseco aparecen dos
clases de semiconductores: Semiconductor tipo N, Semiconductor tipo P
2.3.1 Semiconductores tipos N.
Cuando las impurezas añadidas son predominantemente del grupo V-A de la tabla
periódica (fósforo (P), arsénico (As), antimonio (Sb)), el semiconductor se denomina tipo
N y las impurezas se denominan donantes. Los átomos de este grupo poseen en su
última capa 5 electrones. Así por ejemplo, si un átomo de
Si
, por ejemplo, es sustituido
por un átomo de
As
, tras formar los 4 enlaces covalentes con los 4 átomos de
Si
vecinos,
queda un electrón del átomo de
As
sin emparejar y por lo tanto tan débilmente ligado al
átomo de
As
, que a temperatura poco por encima del 0 K quedará libre, es decir,
ocupando un nivel de la
BC
. Como esto ocurrirá con cada átomo de impureza de
As
, en la
BC
tendremos, además de los electrones debidos a la generación de pares, un electrón
por cada átomo de impureza donante, o sea, que tendremos más electrones en la
BC
que
huecos:
n p
. Así pues, los portadores mayoritarios son los electrones y los minoritarios
son los huecos. En la práctica, en los SC tipo N los electrones de la BC son en su mayoría
donados por los átomos de impureza donante, hasta el punto que se puede suponer que
n »N
d
, siendo
N
d
la densidad de impurezas donantes (nº de átomos de impureza en 1
cm
3
).
Si en una red cristalina de silicio (átomos de silicio enlazados entre sí)...
DISEÑO ELECTRONICO ANALOGO
19
Enlace covalente de átomos de germanio, obsérvese que cada átomo
comparte cada uno de sus electrones con otros cuatro átomos
... sustituimos uno de sus átomos (que como sabemos tiene 4 electrones en su capa
exterior) por un átomo de otro elemento que contenga cinco electrones en su capa
exterior, resulta que cuatro de esos electrones sirven para enlazarse con el resto de los
átomos de la red y el quinto queda libre.
DISEÑO ELECTRONICO ANALOGO
20
Semiconductor dopado tipo N
A esta red de silicio dopado con esta clase de impurezas se le denomina Silicio tipo
N
En esta situación hay mayor número de electrones que de huecos. Por ello a estos
últimos se les denomina portadores minoritarios y portadores mayoritarios a los
electrones
Las Impurezas tipo N más utilizadas en el proceso de dopado son el arsénico, el
antimonio y el fósforo
Está claro que si a un semiconductor dopado se le aplica tensión en sus bornas, las
posibilidades de que aparezca una corriente en el circuito son mayores a las del caso de
la aplicación de la misma tensión sobre un semiconductor intrínseco o puro.
2.3.2 Semiconductores tipos P.
Cuando las impurezas añadidas son predominantemente del grupo III-A de la tabla
periódica (aluminio (Al), galio (Ga), indio (In)), el semiconductor se denomina
tipo P
y las
impurezas se denominan aceptantes. Los átomos de este grupo poseen en su última
capa 3 electrones. Así por ejemplo, si un átomo de
Si
, es sustituido por un átomo de
Ga
,
tras formar los 4 enlaces covalentes con los 4 átomos de
Si
vecinos, queda un enlace sin
completar. A temperatura poco por encima del 0 K lo ocupará un electrón de la
BV
, que
dejará un hueco la
BV
. Como esto ocurrirá con cada átomo de impureza de
Ga
, en la
BV
tendremos, además de los huecos debidos a la generación de pares, un hueco por cada
átomo de impureza aceptante, o sea, que tendremos más huecos en la
BV
que electrones
en la
BC
:
pn
. Así pues, los portadores mayoritarios son los huecos y los minoritarios
son los electrones. En la práctica, en los SC tipo P, los huecos son en su mayoría debidos
a los átomos de impureza aceptante, hasta el punto que se puede suponer que
p
N
a
,
siendo
N
a
la densidad de impurezas aceptantes (nº de átomos de impureza por cm
3
).
Como hemos dicho la tasa de generación de pares,
(T)
, (nº de pares electrón-hueco
generados por unidad de tiempo) es únicamente dependiente de la temperatura. El
proceso antagonista, la recombinación o aniquilación de pares, es probabilístico y por lo
tanto la tasa de pares electrón-hueco aniquilados por unidad de tiempo, será proporcional
al producto
n.p
. Cuando ambos mecanismos estén equilibrados
n.p =
(T)
, con
independencia del grado de impurificación. Por lo tanto, para un SC intrínseco, se
verificará que
n
i
2
=
(T)
; y finalmente de las dos relaciones anteriores se deduce la
llamada ley de acción de masas:
n.p = n
i
2
(1)
Así pues, para un SC tipo N real, se puede considerar que
n
N
d
y por la ecuación (1)
p
n
i
2
/
N
d
y
naturalmente
n
p
; igualmente, para un SC tipo P,
p
N
a
y
n
n
i
2
/
N
a
y
n
p
.
Si en una red cristalina de silicio (átomos de silicio enlazados entre sí) ...
DISEÑO ELECTRONICO ANALOGO
21
Enlace covalente de átomos de germanio, obsérvese que cada átomo comparte
cada uno de sus electrones con otros cuatro átomos
... sustituimos uno de sus átomos (que como sabemos tiene 4 electrones en su capa
exterior) por un átomo de otro elemento que contenga tres electrones en su capa exterior,
resulta que estos tres electrones llenarán los huecos que dejaron los electrones del átomo
de silicio, pero como son cuatro, quedará un hueco por ocupar. Osea que ahora la
sustitución de un átomo por otros provoca la aprición de huecos en el cristal de silicio. Por
tanto ahora los portadores mayoritarios serán los huecos y los electrones los portadores
minoritarios.
A esta red de silicio dopada con esta clase de impurezas se le denomina silicio tipo P
DISEÑO ELECTRONICO ANALOGO
22
Semiconductor dopado tipo P
OBSERVACIONES
Los semiconductores dopados se representan indicando dentro de los mismos el tipo
de portadores mayoritarios.
Semiconductor tipo N
Semiconductor tipo P
No siempre el índice de dopado de un semiconductor es el mismo, puede ser que este
poco dospado, muy dopado, etc.
Es norma utilizar el signo (+) para indicar que un semiconductor está fuertemente
dopado.
Semiconductor tipo N
fuertemente dopado
Semiconductor tipo P
fuertemente dopado
Todos los componentes electrónicos en estado sólido que veremos en adelante
(transistores, diodos, tiristores) no son ni más y menos que un conjunto de
semiconductores de ambos tipos ordenados de diferentes maneras.
DISEÑO ELECTRONICO ANALOGO
23
3. DISTRIBUCIÓN ENERGÉTICA DE LOS ELECTRONES.
El problema que nos interesa resolver se formularía de la siguiente manera: dentro de
una banda permitida, por unidad de volumen, y a una temperatura T, queremos averiguar
cuántos electrones tienen energías comprendidas entre E y E+dE. Supongamos que
conocemos la densidad de estados de energía permitidos, S(E), o sea, el número de
estados permitidos por unidad de intervalo energético. En este caso el número de estados
para un intervalo de energía comprendido entre E y E+dE será:
dS(E) = S(E).dE (2)
Supongamos que también conociéramos la probabilidad de que un nivel de energía E
esté ocupado por un electrón a la temperatura T. Esta probabilidad, será función en
general de la energía y de la temperatura. Es la denominada función de Fermi, F(E,T).
Ahora, el número de electrones con energías comprendidas E y E+dE será:
dn(E,T) = S(E). F(E,T).dE (3)
que también puede ponerse así:
= S(E). F(E,T).dE (4)
que es la distribución energética de Fermín-Dirac-Sommerfield o abreviadamente, ley de
distribución FDS. Así pues, el problema ha quedado separado en dos:
1. determinación de la densidad de Estados, S(E).
2. determinación de la función de Fermi, F(E,T).
4. DENSIDAD DE ESTADOS EN LAS BANDAS.
La densidad de estados, (la deducción no la haremos, pero la podemos proporcionar a los
alumnos que estén interesados), resulta ser:
a. En la banda de conducción:
(5)
(6)
DISEÑO ELECTRONICO ANALOGO
24
En estas, E
C
es el nivel de energía más bajo de la banda de conducción. Cualquier
electrón puede ir perdiendo energía cinética (se va a deteniendo) descendiendo de
nivel hasta llegar a E
C
. De aquí que pueda interpretarse este fondo de la banda de
conducción como la energía potencial del electrón, pues es la que le que queda al
detenerse. Por la misma razón E E
C
es la energía cinética del electrón de
energía total E.
La K
C
engloba, además de constantes universales, m
c
3/2
donde m
C
es la llamada masa
efectiva que no es igual a la masa en reposo de un electrón aislado, si bien no difiere mucho
de ella.
b. En la banda de valencia:
(7)
(8)
En estas, E
v
es el nivel de energía más alto de la banda de valencia. El K
v
engloba, además de
constantes universales, m
v
3/2
donde m
v
es la llamada masa efectiva del hueco que no difiere mucho
de la masa en reposo del electrón aislado
5. PROBABILIDAD DE OCUPACIÓN
Las ideas de la Mecánica Cuántica y la Estadística de Boltzman nos permitirían deducir la
expresión de la probabilidad de ocupación de un nivel E a una temperatura T. Esta
expresión no tiene en cuenta si el nivel correspondiente que está ocupado ó no:
Para la banda de valencia, teniendo en cuenta que hemos justificado la conveniencia de
referirnos a los huecos en lugar de a los electrones, convendrá considerar la probabilidad
de que un nivel de este desocupado, que corresponde a la probabilidad de existencia de
un hueco:
DISEÑO ELECTRONICO ANALOGO
25
La expresión (9), de la que hemos deducido la (10), es la llamada función de Fermi. En
ella aparece E
F
, que es una energía que se denomina nivel de Fermi, y que tiene un
importante significado de la descripción del comportamiento de los semiconductores.
5.1 Discusión de la función de Fermi.
a- Extrapolación al cero absoluto (T=0 K)
Si E E
F
... F
0
Si E E
F
... F
1
Lo que quiere decir que en el cero absoluto no hay electrones por encima del nivel de Fermi y, por
debajo del mismo, todos los niveles estarán ocupados. Por consiguiente, dada la diferenciación que
hemos establecido anteriormente entre semiconductores y aislantes, resulta:
1.
En los conductores, el nivel de Fermi se sitúa dentro de la banda de conducción
estando ocupados todos los niveles por debajo del nivel de Fermi y no habiendo
electrones con energía superiores a E
F
.
2.
En los semiconductores, el nivel de Fermi estará forzosamente la banda prohibida
entre la de conducción y la de valencia.
b-Fuera del cero absoluto (T0 K):
Si E = E
F
... ..... F = 1/2
F = 0 y F = 1 son asíntotas a cualquier T. (ver figuras 1 y 2)
DISEÑO ELECTRONICO ANALOGO
26
6. LOCALIZACIÓN DEL NIVEL DE FERMI.
a Conductores:
Ya hemos dicho que el nivel de Fermi se encuentra en la banda de conducción. Si
extrapolamos al cero absoluto, todos los niveles comprendidos entre E
c
y E
F
estarán
ocupados, por lo que para calcular cuántos electrones de la banda de conducción hay por
unidad del volumen bastará integrar la función S
c
(E) entre E
c
y E
F
:
Hemos supuesto que K
C
sólo depende de la temperatura, por lo que se ha sacado
fuera de la integral. Esto es aproximadamente cierto para la banda de conducción
de los metales. Como la densidad de electrones en la banda de conducción no
depende de la temperatura, conociendo dicha densidad, N=n(0), podemos
localizar el nivel de Fermi a partir de la (11):
b- Semiconductores:
DISEÑO ELECTRONICO ANALOGO
27
Para empezar, supondremos que las bandas de conducción y de valencia con sus
respectivos portadores electrones y huecos, tienen un comportamiento simétrico. Más
concretamente supongamos dos intervalos estrechos entre E
1
y E
1
+dE en la banda de
conducción y entre E
2
y E
2
-dE en la banda de valencia, tales que E
1+
E
2
= E
C+
E
V
. A
ambos les corresponderá la misma densidad de estados y por lo tanto la relación entre el
número de electrones y de huecos en dichos intervalos energéticos será:
Si E
1-
E
F
y E
F-
E
2
son suficientemente mayores que kT, las exponenciales serán
mucho mayores que la unidad y por lo tanto la podría escribirse así:
y podemos escribir:
en donde:
Es la separación energética del nivel de Fermi respecto al nivel central de la
banda prohibida que está entre las de conducción y la de valencia. Luego
podremos poner la (13) así:
Como la (10) es independiente de la pareja de niveles de E
1
y E
2
elegidos, pondremos
ponerla finalmente así:
DISEÑO ELECTRONICO ANALOGO
28
Ecuación que nos sitúa el nivel de Fermi con relación a las bandas de energía. Si
consideramos además la ley de acción de masas, podemos escribir la (18) así:
En los semiconductores tipo N, n p, lo cual implica que
E 0, es decir que el nivel de Fermi se
aproxima a la banda de conducción tanto más cuanto más fuertemente impurificado esté. Para
fuertes impurificaciones será n
N
d
y
En los semiconductores tipo P, p n, lo cual implica que
E 0, es decir que el nivel de Fermi se
aproxima a la banda de valencia tanto más cuanto más fuertemente impurificado esté. Para fuertes
impurificaciones será p
N
a
y
Para los semiconductores intrínsecos, p = n, lo que implica que
E = 0, es decir que el nivel de
Fermi está exactamente en el centro de la banda prohibida.
Si se eleva la temperatura, n
i
(T) crece y tanto n/n
i
como n/p tienden a la unidad, lo que equivale a
decir que los materiales tienden a comportarse como intrínsecos para temperaturas elevadas.
7. LA UNIÓN N-P.
La unión de un cristal de un semiconductor tipo N con otro tipo P tiene un
comportamiento que la hace interesante en aplicaciones tanto analógicas como digitales.
Esta unión da lugar a una familia de dispositivos básicos denominados
diodos
y a otros
dispositivos más complejos y tecnológicamente aún más interesantes, que se denominan
transistores de unión.
Para describir el comportamiento de la unión N-P, nos basaremos en las propiedades,
descritas anteriormente, de los semiconductores intrínsecos y dopados. El proceso de
fabricación implica dopar una parte de un cristal de forma que se comporte como de tipo P
y otra parte del mismo de forma que se comporte como de tipo N. Es decir, en ningún
momento las partes N y P están separadas. Sin embargo, para describir los fenómenos
que explican el comportamiento de la unión, resulta pedagógico suponer que inicialmente
DISEÑO ELECTRONICO ANALOGO
29
los bloques N y P están separados y que en algún instante inicial se unen. Hecha esta
suposición, vamos a describir lo que ocurre a partir del instante inicial.
Lo interesante de los semiconductores es cómo se comportan cuando se juntan dos o
más.
Por si mismo, un semiconductor dopado no es más que una resistencia eléctrica y hay
modos mucho más fáciles de crear una resistencia.
El dispositivo que aparece arriba a la izquierda es una unión PN (un material dopado P se
coloca junto a un material dopado N). Así se forma un diodo.
En la esquina inferior izquierda aparece la configuración de los dopantes: cómo estarían
los electrones y los huecos si se colocasen ambos materiales uno junto a otro, pero sin
tocarse.
Cuando se forma una unión PN, las cargas y los huecos que se encuentran en la
interacción se combinan y se aniquilan. Esto crea una zona de agotamiento alrededor de
la unión en la que hay una falta neta de transportes. De nuevo, nótese que, dado que un
electrón negativo se aniquila con un hueco positivo, la estructura de la red permanece
neutral.
La aniquilación de transportes libera energía, lo que se puede utilizar para generar fotones
de luz (como en el caso de los diodos electroluminiscentes o LED) y la luz también se
puede utilizar para crear transportadores, como en el caso de los fotodiodos y los
fototransistores. Esto se presentará más adelante.
DISEÑO ELECTRONICO ANALOGO
30
La falta de transportes de carga en la interacción de una unión PN significa que hay una
separación de carga en la unión (dado que los dopantes no se ven afectados en modo
alguno por la aniquilación de transportadores). La separación de la carga introduce un
campo eléctrico a través de la unión y este voltaje a. Nótese que, aunque hay una
separación de carga, no hay exceso de carga, por lo que el dispositivo es eléctricamente
neutro.
El área de un campo eléctrico (o separación de carga) se llama zona de agotamiento
porque la aniquilación de transportadores de carga crea en una zona en la unión en la que
no hay transportadores.
En dispositivos de silicio, la separación de carga produce un voltaje de 0.7 V a través de
la interacción. Este es el origen del voltaje necesario para encender un diodo.
DISEÑO ELECTRONICO ANALOGO
31
8. EL DIODO DE UNIÓN.
El dispositivo de estado sólido más simple es en realidad la unión PN tal como ha sido
descrita anteriormente y que se denomina tecnológicamente
diodo de unión
. El
comportamiento simplificado corresponde de este diodo idealizado responde a la
siguiente expresión:
Denominada
ecuación de Schockley
. La representación gráfica la vemos en la figura
8.1(a). En ella observamos que en polarización directa el dispositivo se comporta como
una resistencia pequeña (casi como un cortocircuito), mientras que en polarización
inversa el dispositivo es como una resistencia muy elevada (casi un circuito abierto).
a) Polarización directa b) Polarización inversa
Figura 8.1
DISEÑO ELECTRONICO ANALOGO
32
La esencia de la acción de una unión PN polarizada directamente es que se pueden
inyectar transportadores mayoritarios. Así, a una unión PN con un voltaje positivo que la
atraviesa se le inyectan electrones en la región n y huecos en la región p, por lo que, si el
voltaje que cruza el dispositivo es suficiente para superar el voltaje de la unión, la
corriente fluirá.
Cuando la polarización de una unión PN es directa, la corriente de difusión es mucho
mayor que la corriente minoritaria, que se puede ignorar.
DISEÑO ELECTRONICO ANALOGO
33
En el caso de la polarización inversa, la unión pasa a estar aún más agotada de
transportadores y la corriente importante es la corriente transportadora minoritaria (o
corriente inversa de saturación), que es pequeña en comparación con la corriente directa
del caso de polarización directa, pero que hay que tenerla en mente para algunas
aplicaciones.
La corriente portadora minoritaria no se ve influenciada por el voltaje que atraviesa la
unión, y es una mera propiedad del material. En el silicio es baja y en el germanio es de
alrededor microamperio. Esta es la principal razón por la que el silicio se encuentra más
en diodos y transistores. En las figuras 8.2 (b) y 8.3 (a) y (b), vemos otras aproximaciones
del diodo, válidas cada una de ellas en diferentes circunstancias.
El hecho de que en todo caso el diodo presente dos estados tan netamente diferenciados
hace que el diodo pueda servir para representar físicamente los 2 valores de una variable
binaria; por ejemplo, el estado de polarización directa, que en los circuitos digitales se suele
denominar ON, podría representar el valor 1 de una variable booleana, mientras el estado de
polarización inversa, o estado OFF, podría representar el valor 0 de la misma variable. Así
pues, se pueden diseñar circuitos digitales usando diodos de unión; sin embargo, por
tratarse de elementos pasivos, su utilidad en este campo es limitada.
(a) (b)
Figura 8.2
DISEÑO ELECTRONICO ANALOGO
34
(a) (b)
Figura 8.3
8.1 Limitaciones de los diodos reales.
Tanto en sentido directo como en sentido inverso, en el diodo se produce una
disipación de energía calorífica, que eleva la temperatura de la unión por encima de la
temperatura ambiente. A su vez hay una cesión de calor desde el diodo al ambiente. La
temperatura alcanzada por la unión se puede cuantificar de forma aproximada por una
expresión como esta:
donde T
a
es la temperatura ambiente, I la intensidad que circula por el diodo, V la d.d.p. entre los
extremos del diodo y
es la llamada resistencia térmica del diodo. Esta dependerá de las facilidades
del circuito para refrigerarse: cuanto menor sea
, más potencia podrá disipar el diodo sin
calentarse peligrosamente. Por lo tanto en polarización directa habrá una intensidad I
max
, que no
deberá sobrepasarse para no alcanzar una temperatura excesiva (175 a 200 C). En sentido inverso, la
intensidad es muy pequeña (I
s
), pero crece con la temperatura y si se sobrepasa un cierto valor de
d.d.p. V
max
, puede producirse un efecto de inestabilidad térmica realimentado que acabe quemando
el diodo. Estos efectos y otros que veremos a continuación no están descritos por ninguno de los
modelos simplificados que hemos visto anteriormente.
En polarización inversa puede presentarse el llamado
efecto avalancha
: si la tensión
inversa aplicada alcanza un determinado valor, el campo eléctrico puede acelerar los
pocos electrones libres de la zona de depleción, que, a su vez, pueden arrancar por
colisión electrones de valencia. Estos son a su vez acelerados alcanzando gran velocidad
y siendo capaces de colisionar y arrancar nuevos electrones. Por lo tanto se llega a
producir una avalancha de corriente inversa, que en los diodos ordinarios produciría
probablemente una excesiva elevación de la temperatura y su avería.
DISEÑO ELECTRONICO ANALOGO
35
Rectificación de media onda y rectificación de onda completa.
Este es el circuito más simple que puede convertir corriente alterna en corriente continua.
Este rectificador lo podemos ver representado en la siguiente figura:
D1
1N4004
TR1
TRAN-2P2S
R1
10k
Figura 8.3a Circuito Rectificador de Media Onda
Durante el semiciclo positivo de la tensión del primario, el bobinado secundario tiene una
media onda positiva de tensión entre sus extremos. Este aspecto supone que el diodo se
encuentra en polarización directa. Sin embargo, durante el semiciclo negativo de la
tensión en el primario, el arrollamiento secundario presenta una onda sinusoidal negativa.
Por tanto, el diodo se encuentra polarizado en inversa.
La onda que más interesa es VL, que es la que alimenta a R1. Pero es una tensión que
no tiene partes negativas, es una Tensión Continua Pulsante, y nosotros necesitamos
una Tensión Continua Constante. Analizaremos las diferencias de lo que tenemos con lo
que queremos conseguir.
La siguiente figura muestra un rectificador de onda completa con 2 diodos:
DISEÑO ELECTRONICO ANALOGO
36
D1
1N4004
R1
10k
TR1
TRAN-2P3S
D2
1N4004
Figura 8.3b Circuito Rectificador de Onda Completa
El rectificador superior funciona con el semiciclo positivo de la tensión en el secundario,
mientras que el rectificador inferior funciona con el semiciclo negativo de tensión en el
secundario.
Es decir, D1 conduce durante el semiciclo positivo y D2 conduce durante el semiciclo
negativo. Así pues la corriente en la carga rectificada circula durante los dos semiciclos.
En este circuito la tensión de carga VL, como en el caso anterior, se medirá en la
resistencia R1.
DISEÑO ELECTRONICO ANALOGO
37
R1
10k
TR1
TRAN-2P2S
BR1
BRIDGE
D1
D2
D3
D4
Figura 8.3c Circuito Rectificador de Onda Completa con Puente
Mediante el uso de 4 diodos en lugar de 2, se elimina la necesidad de la conexión
intermedia del secundario del transformador. La ventaja de no usar dicha conexión es que
la tensión en la carga rectificada es el doble que la que se obtendría con el rectificador de
onda completa con 2 diodos.
Durante el semiciclo positivo de la tensión de la red, los diodos D1 y D3 conducen, esto
da lugar a un semiciclo positivo en la resistencia de carga.
Los diodos D2 y D4 conducen durante el semiciclo negativo, lo que produce otro semiciclo
positivo en la resistencia de carga.
El resultado es una señal de onda completa en la resistencia de carga.
Hemos obtenido la misma onda de salida VL que en el caso anterior.
La diferencia más importante es que la tensión inversa que tienen que soportar los diodos
es la mitad de la que tienen que soportar los diodos en un rectificador de onda completa
con 2 diodos, con lo que se reduce el costo del circuito.
DISEÑO ELECTRONICO ANALOGO
38
Características de un Diodo:
Propiedades:
·
El material del cual está construido el diodo (Silicio Si o Germanio Ge), determinan
la caída de tensión a través del diodo.
·
Máxima tensión inversa, PRV (Peak reverse voltaje) o PIV (Peak inverse voltaje).
·
If, Máxima corriente directa (Normalmente, si esta es muy grande, implica una gran
capacidad de la unión).
·
Capacidad depende del tamaño y la geometría dela unión (se le puede considerar
como paralela a ella).
·
Cada dispositivo tiene unas características definitorias que la industria ha
encontrado útiles al describirlas. Incluso en dispositivos tan sencillos como los
diodos hay cientos de tipos que se han diseñado específicamente para:
Conmutación, Rectificación, Potencia, Alta frecuencia, Baja dispersión
Normalmente, al elegir un diodo hay que conocer las tasas máximas de voltaje y corriente.
Además, los diodos tienen una capacidad significativa, que se debe incluir en los diseños
de alta frecuencia.
La ficha técnica de un diodo de uso general normal, obtenida en la página web de
Fairchild, un buen lugar para encontrar fichas técnicas.
Todas las fichas técnicas comienzan mostrando las distintas versiones del dispositivo y a
continuación, las tasas máximas seguidas de las especificaciones y, a veces,
configuraciones de prueba.
Multiplicadores: En ocasiones se presentan cargas que necesitan una tensión muy alta y
que absorben una corriente pequeña como es el caso del tubo de rayos catódicos del
televisor, monitor u osciloscopio.
Para elevar el voltaje de una red es necesario adquirir un transformador elevador con los
diodos y condensadores que se necesiten
Figura 8.3d Circuito Multiplicador de Voltaje
Y tenemos un rizado casi nulo.
DISEÑO ELECTRONICO ANALOGO
39
El mayor problema es que el transformador elevador sería muy grande porque necesitaría
muchas espiras, además el campo eléctrico sería grande, el voltaje inverso pico del diodo
(VIP) también (VID = 2Vpico = 2·933 = 1833 V en inversa), mucha tensión en el
Condensador.
Por eso no se usa un transformador elevador sino que se utiliza un multiplicador de
voltaje, entre estos tenemos cuatro:
1. El Doblador de tensión: Para comenzar a analizar este tipo de circuitos es
interesante tener en cuenta: Empezar en el semiciclo (malla) donde se cargue un
solo condensador.
Figura 8.3e Circuito Duplicador de Tensión
Figura 8.3f Funcionamiento Circuito Duplicador de Tensión
Entonces nos queda de esta forma si ponemos la carga en C2:
Figura 8.3g Análisis Circuito Duplicador de Tensión
DISEÑO ELECTRONICO ANALOGO
40
La masa se coloca en el borne negativo del condensador. Y se carga C2 a 622V. Y como
se ve, si se conectan los bornes a C2, esto es un doblador de tensión. Como la corriente
de descarga es pequeña, el C2 se descarga despacio con una constante de tiempo de
valor:
Resumiendo tenemos:
Figura 8.3h Resumen Funcionamiento Circuito Duplicador de Tensión
2. El Doblador de tensión de onda completa
Figura 8.3i Circuito Duplicador de Tensión de Onda Completa
Quitamos la carga para analizarlo. Como ya se ha dicho antes empezamos por donde
haya un solo condensador. Si representamos VL en función del tiempo.
DISEÑO ELECTRONICO ANALOGO
41
Figura 8.3j Análisis Circuito Duplicador de Tensión de Onda Completa
Se van turnando los 2 condensadores, como cada uno es de 60 Hz, los 2 a la vez son 120
Hz. Este circuito tiene una ventaja respecto al anterior: El rizado es más pequeño. La
desventaja radica en que no sabemos dónde colocar la masa, en el caso anterior lo
teníamos fácil, pero ahora si ponemos debajo de RL no hay ningún borne de la red a
masa. Si conectamos una carga también a masa puede haber un cortocircuito. Hay que
andar con cuidado al usar ese circuito.
3. El Triplicador: El principio es idéntico al duplicador de media onda: Semiciclo
negativo se carga C1, semiciclo positivo se carga C2 a 622 V, semiciclo negativo
se carga C3 a 622 V, 2 veces el pico. Ahora elegimos los bornes para sacar:
Figura 8.3k Circuito Triplicador
Con esto se puede hacer un doblador y un triplicador dependiendo de donde se colocan
los bornes. Y tenemos 933 V a la salida. El truco consiste en que la constante de tiempo
de descarga sea:
Y si a este circuito se le añade una etapa más (diodo y condensador) se convierte en un
cuadriplicador.
DISEÑO ELECTRONICO ANALOGO
42
4. El Cuadriplicador: Es como los anteriores, y la tensión se toma como se ve en la
figura:
Figura 8.3l Circuito Cuadruplicador
Recortadores ó limitadores: Podemos tener dos tipos de diodos:
· De Pequeña Señal: Frecuencias mayores de red, limitaciones de potencia
menores que 0.5 W (corrientes de miliamperios).
o
Limitadores.
o
Cambiadores de nivel.
o
Detector de pico a pico.
· De Gran Señal: Diodos de potencia, son los diodos que se usan en las fuentes
de alimentación, tienen una limitación de potencia mayor que 0.5 W (corrientes de
Amperios).
Ahora vamos a analizar los diodos de pequeña señal.
Recortador positivo:
Figura 8.3m Circuito Limitador o Recortador positivo
Se tomo RL R para que en el semiciclo negativo vaya todo a la salida.
DISEÑO ELECTRONICO ANALOGO
43
Recorta los semiciclos positivos, limita o recorta. Si se usa la 2ª aproximación:No recorta
de forma perfecta por no ser ideal el diodo.
Limitador positivo polarizado: Es como el anterior pero con una fuente de voltaje
adicional.
Figura 8.3n Limitador ó recortador con fuente de voltaje adicional
Limitador negativo: La diferencia con el limitador positivo radica en el cambio de
dirección del diodo.
Figura No. 8.3o Recortador Negativo
Para explicar el comportamiento del limitador negativo vamos a analizar un
limitador doble, que está compuesto por un limitador polarizado positivo y otro
limitador polarizado negativo.
DISEÑO ELECTRONICO ANALOGO
44
Figura No. 8.3p Funcionamiento de un limitador negativo.
Esto era para RL R. Si no se cumpliera esto no sería una senoidal cuando no
conducen los diodos. Es un circuito recortador (limitador), es un circuito limitador
positivo polarizado y limitador negativo polarizado.
Aplicación: Si se mete una onda de pico muy grande a la entrada, aparece una
onda prácticamente cuadrada a la salida, que aunque no sea tan parecida se toma
como si fuese una onda cuadrada (es imposible hacer una onda cuadrada
perfecta).
Primera aplicación: Transformar una Senoidal a Cuadrada. Si recorto en + 5 V
y en 0 V. Puedo aprovechar esto para electrónica digital.
DISEÑO ELECTRONICO ANALOGO
45
Así se protege la carga de tensiones mayores de + 5 V. Limitador = Fijador =
Recortador. Pero este circuito suele ser caro debido a la fuente de voltaje
adicional, que suele ser una fuente de alimentación con su condensador, diodos,
etc... Como la pila es cara se ponen muchos diodos:
El único inconveniente de este circuito es que nos limita esa tensión a múltiplos de
0,7 V.
8.2 TIPOS DE DIODOS.
Además del diodo ordinario, que respondería tendría un comportamiento descrito
aproximadamente por uno de los modelos de las figuras 8.2 y 8.3, determinadas variantes
de diodos de unión presentan en algunas circunstancias comportamientos singulares, que
pueden aprovecharse en ciertas aplicaciones electrónicas. Así tenemos una amplia gama
de diodos:
- Diodos ordinarios: se aprovecha su comportamiento de casi cortocircuito en sentido
directo y casi circuito abierto en inverso. Son útiles por lo tanto, entre otros, en circuitos
rectificadores (conversores de c.a. en c.c.), en circuitos digitales (matrices de diodos).
- Fotodiodos PIN y APD de avalancha: son diodos que trabajan en polarización inversa.
A través de fibra óptica pueden recibir impulsos luminosos, de forma que, antes de recibir
tal impulso, el número de electrones libres en la zona de depleción no es suficiente para
desencadenar la avalancha (el fotodiodo no conduce). Al llegar el impulso luminosos, los
fotones liberan electrones y se desencadena la avalancha (el fotodiodo conduce).
Naturalmente, estos diodos están diseñados para soportar sin daño la avalancha.
- Diodos Zenner: son diodos que trabajan también con polarización inversa. Esta
produce en parte un efecto de avalancha, pero además hay un paso de portadores por
efecto túnel
.
Este efecto, de manera algo simplista, consiste en lo siguiente: supongamos que una
partícula cargada se mueve hacia una región en la que hay una barrera de potencial de
altura
V
. La energía cinética inicial de la carga es
E
c
;
cuando entra en la barrera de
DISEÑO ELECTRONICO ANALOGO
46
potencial parte de su energía cinética
(
1/2 mv
2
)
se va
transformando en energía potencial,
lo que implica, según la Física Clásica, que la energía cinética, o lo que es lo mismo, la
velocidad disminuye. Si
qV
E
c
, la partícula llegará a pararse, es decir, no podrá atravesar
la región. El razonamiento anterior es correcto según la Física Newtoniana y la conclusión
es que no hay efecto tunel.
La Mecánica Cuántica explica el fenómeno de forma totalmente distinta: la partícula es
considerada no como un corpúsculo localizado, sino como una onda (función de onda),
cuya amplitud representaría una probabilidad de localización. Cuando la partícula-onda
alcanza la barrera de potencial en parte se refleja, (probabilidad de que la partícula no
pase la barrera), y en parte se refracta, (probabilidad de que la partícula atraviese la
barrera). Es decir, hay una probabilidad no nula de que la partícula pase a través de la
barrera (como por un túnel), es decir hay
efecto túnel
. En este caso la experiencia daría
la razón a la Mecánica Cuántica.
El diodo Zenner presenta una característica I -- V como la que vemos en la figura 8.4.
Vemos que trabajando en la zona Zenner, el diodo mantiene una tensión fija,
Vz
, con
independencia de la corriente que circule, o sea, es un estabilizador de tensión. Sus
numerosas aplicaciones en los circuitos se basan en esta propiedad.
DISEÑO ELECTRONICO ANALOGO
47
- Diodos túnel: Si los diodos Zenner aprovechan el efecto túnel con polarización inversa,
los diodos túnel se basan en el mismo efecto, pero trabajando con polarización directa.
Sin embargo, para que se manifieste el efecto túnel se fabrican de forma que los bloques
N y P están mucho más dopados que en los diodos ordinarios. El resultado es un
comportamiento muy diferente al de los diodos ordinarios (Figura 8.5). Lo más curioso es
la zona de resistencia incremental negativa, es decir una región en la que un incremento
positivo de la tensión
V
se traduce en un incremento negativo de la intensidad
I
. Las
aplicaciones de los diodos túnel aprovechan precisamente esta zona.
- Diodos emisores de luz LED: son diodos fabricados con un semiconductor compuesto.
Su cápsula es transparente para dejar pasar la luz (fotones) emitida cuando se
recombinan en la zona de depleción huecos y electrones en tránsito.
La intensidad de la
luz emitida puede modularse variando la tensión directa aplicada. El color de la luz
depende del semiconductor; así:
Semiconductor
C
o
l
o
r
AsGa
Infrarrojo
PGa
Verde
AsPGa
diferentes según proporción de As y
P
Se utilizan para los mandos a distancia por infrarrojos, e indicadores (displays)
alfanuméricos. La tecnología de los LED se está desarrollando continuamente. Se
DISEÑO ELECTRONICO ANALOGO
48
fabrican ya LED de luz blanca (mezcla de los colores fundamentales rojo, verde y azul) y
de intensidad luminosa elevada a precios competitivos, lo que explica que vayan
sustituyendo a la luz de incandescencia y fluorescente en iluminación urbana y doméstica
y otras aplicaciones. Por ejemplo, están utilizándose cada vez más en pilotos e
intermitentes de coches, semáforos y, por supuesto paneles murales de publicidad o
información. El rendimiento (intensidad luminosa/watio) es mucho mayor, por lo que el
consumo energético es mucho menor que en los sistemas tradicionales.
(a) (b) (c) (d) (e)
Figura 8.6
Los símbolos de los diodos nombrados son los que vemos en la Figura 8.6:
(a) Diodo ordinario; (b) Diodo Zenner; (c) Diodo túnel; (d) Fotodiodo; (e) LED.
DISEÑO ELECTRONICO ANALOGO
49
PRACTICA 1 CIRCUITOS RESISTIVOS
1.- Monta el siguiente circuito utilizando los valores de resistencia que prefieras
2.- Completa la siguiente tabla, realizando las operaciones que creas necesarias, y
mostrándolas en esta hoja o detrás, imprime el circuito EWB con Amplificadores y
Voltímetros, imprímelo con sus valores activos, recortalo y pégalo detrás.
CÁLCULOS
MEDIDAS
ORDENADOR
R
V
I
V
I
V
I
R1
R2
R3
R4
3.-Comenta los resultados obtenidos
DISEÑO ELECTRONICO ANALOGO
50
PRACTICA 2 CARGA Y DESCARGA DE UN CONDENSADOR
1.- Calcula el circuito siguiente de tal forma que el condensador tarde 50 segundos en
cargarse; y 80 segundos en descargarse, una vez colocado el conmutador S en la posición2,
muestra tus cálculos detrás de esta hoja, y monta el circuito en el taller
RECUERDA: El tiempo que tarda un condensador en cargarse o descargarse depende de la
constante de carga t=5RC
2.- Realiza las medidas necesarias para dibujar las gráficas correspondientes a la carga del
condensador, por ejemplo cada 5 o 10 seg.
CARGA REAL
t (seg.)
0
5
10
15
20
25
30
35
40
45
50
55
60
Vc (V)
3.- Realiza las medidas necesarias para dibujar las gráficas del taller correspondientes a la
descarga del condensador, por ejemplo cada 5 o 10 seg.
DESCARGA REAL
T (seg.)
0
5
10 15 20 25 30 35 40 45 50 55 60 65 70 75 80
Vc (V)
4.- Dibuja las 2 gráficas (gráficas de taller) en el papel cuadriculado de la hoja siguiente,
añádelas a esta memoria, la de Carga Real píntala de azul, y la Descarga Real, de negro
5.- Con las siguientes fórmulas tienes que rellenar los cuadros de la carga teórica y la de la
descarga teórica:
Vc=E-(E-Eo) e-t/RC
t=RC ln(E-Eo)/(E-Vc)
CARGA TEÓRICA
t (seg.) 0
10
40
Vc (V)
12
DESCARGA TEÓRICA
t (seg.) 0
10
40
Vc (V)
10
6.- Dibuja en la hoja cuadriculada anterior las dos curvas correspondientes a la Carga
Teórica y a la Descarga Teórica, con los mismos colores, pero en TRAZOS. Son las
gráficas teóricas
7.- Monta en el ordenador este circuito rellena unas tablas equivalentes a los pasos 2 y 3
además observa los efectos que producen los cambios de valores, tanto de resistencia, como
de capacidad, en el tiempo de carga y descarga, imprime una hoja con el circuito, las tablas
de valores, y las gráficas de carga y descarga. Éstas serán las gráficas de computador.
8.- ¿Cuál es la conclusión que sacas al observar dichas curvas, las del taller, las teóricas y
las del computador?
DISEÑO ELECTRONICO ANALOGO
51
PRACTICA 3 MANEJO DE OSCILOSCOPIO ANÁLOGO
Objetivo: Medir en el osciloscopio los valores característicos de las señales periódicas que
se emplean en electrónica de potencia, analizar las diferencias con los resultados
matemáticos.
Materiales: 1 osciloscopio. 2 Generador de señal. 3 Multimetro. 4 Transformador.
Procedimiento: Después de calibrar el osciloscopio, medir el secundario del transformado r
con el osciloscopio determinar el vp, vpp, periodo y frecuencia.
Montaje físico
1. Con el transformador seleccionar una de las terminales del secundario y realizar las
siguientes medidas, despues de calibrar el osciloscopio.
vpp= ___ cuadros y ___ rallas = _____
vp= ___ cuadros y ___ rallas = _____
vrms= ______ T = ____ F = _____
2. Con el generador de señal seleccionar una de las frecuencias dadas: 600hz, 1200hz,
80khz
vpp= ___ cuadros y ___ rallas = _____
vp= ___ cuadros y ___ rallas = _____
vrms= ______ T = ____ F = _____
DISEÑO ELECTRONICO ANALOGO
52
PRACTICA 4 MEDIDAS CON EL OSCILOSCOPIO ANÁLOGO
El objetivo de esta práctica es que cojas soltura con la diferente instrumentación del taller,
polímetros, osciloscopios, fuentes de alimentación en continua --- y en alterna ~.
MEDIDA FRECUENCIA
1.- Coloca en el GBF una señal alterna senoidal de 5Vmax, 1khz (si faltan GBF sirve la f.a.
del entrenador, con la salida marcada como ~ en rojo)
2.- Conecta la sonda del osciloscopio a la salida del generador
3.- Coloca en la pantalla del osciloscopio uno o dos periodos de la señal
4.- Completa los siguientes campos, con la mayor atención posible:
TIME/DIV=
Nº de divisiones horizontales=
Multiplicando el nº de divisiones por el valor de la base de tiempos, obtenemos el valor del
periodo T y como sabemos que f=1/T obtendremos el valor de la frecuencia
f=
f medido con la instrumentación1 =
MEDIDA VOLTIOS
5.- El osciloscopio tiene un conmutador rotativo para adecuar la señal de entrada
amplificándola o reduciéndola, VOLT/DIV, según el canal, gira el conmutador hasta que la
señal se pueda visualizar en la pantalla sin salirse de ella, pero ocupando lo máximo
6.- Rellena los siguientes campos
VOLT/DIV=
Nº de divisiones verticales de pico a pico=
Vpp= VOLT/DIV * Nº div horiz pp =
Vp = Vpp/2 =
V ef= Vp/2
Vef medida con el polímetro =
MEDIDA VOLTIOS DE TENSIÓN CONTINUA
7.- Coloca ahora la fuente de alimentación2 en la sonda, y en conmutador, primero ajusta la
tierra con el conmutador en GD fijando la posición inicial del trazo, y después en DC, pon
la fuente de alimentación a 15 V, y mide su tensión análogamente al caso de alterna paso 5
y 6, y comprueba su veracidad con el polímetro.
¿Cuál es tu conclusión?
1
Del polímetro, o si los polímetros no tienen medidas de frecuencia, con el frecuencímetro.
2
Del entrenador V1, o de la fuente de alimentación en continua.
DISEÑO ELECTRONICO ANALOGO
53
PRACTICA 5 CORRIENTE ALTERNA
1.- Monta el siguiente circuito
Utilizando los valores de R C y v que prefieras para visualizar bien el desfase
R=
C=
v=
V,
Hz
2.- Completa la siguiente tabla, realizando las operaciones que creas necesarias, y (las
operaciones puntuan 10 puntos, son complejos) mostrándolas en esta hoja o detrás
CÁLCULOS
MEDIDAS
ORDENADOR
Z
V
I
V
I
V
I
R
C
desfase
3.-Comenta los resultados obtenidos
DISEÑO ELECTRONICO ANALOGO
54
PRÁCTICA 6 CURVA CARACTERÍSTICA DEL DIODO
1.- Realiza el siguiente montaje con un diodo, puede ser Zenner o no, completa la tabla, la I
la calculas con la ley de Ohm ¿Cómo la calcularías teniendo los valores de V, E y R?
V diodo
E
I
R=
2.- Invierte la posición del diodo y repite el proceso anterior
V diodo
E
I
R=
3.- Representa los resultados obtenidos en una gráfica I del diodo en el eje y, V diodo eje x
4.- Que conclusión sacas al ver la forma y los valores de la gráfica. Ponlo detrás.
5.- Busca el diodo en los manuales, e indica aquí las características que ves más
importantes
DISEÑO ELECTRONICO ANALOGO
55
PRÁCTICA 7 RECTIFICACIÓN
1.- Monta los siguientes circuitos de rectificación
2.-Mide todas sus señales con el osciloscopio, dibújalas con un mínimo de precisión
colocando sus valores y escalas empleadas, anota la tensión en continua que hay en la
carga.
3.- Dibujo las tres formas de onda en los siguientes recuadros:
4.- Repite los procesos anteriores con el ordenador, imprime las formas de onda del
osciloscopio pégalas detrás.
5.- Comenta tus conclusiones
DISEÑO ELECTRONICO ANALOGO
56
PRACTICA 8 RECORTADOR ZENER
1.- Monta los siguientes circuitos en el taller:
2- Coloca el transformador ~ +- 12V en la entrada y una vez conectado al circuito mide con
el osciloscopio tanto la entrada como la salida
3.- Mide todas sus señales con el osciloscopio, dibúja las formas de onda, entrada y salida
en la misma gráfica con un mínimo de precisión colocando sus valores y escalas
empleadas.
4.- comenta los resultados obtenidos en cada circuito, ¿Para que sirven ? ¿Qué aplicaciones
ves a estos circuitos?
DISEÑO ELECTRONICO ANALOGO
57
PRACTICA 9 FILTRADO Y RIZADO
1.- Monta el siguiente circuito, el transformador será el de 110/12~. Diséñalo para un
rizado razonable como el de la figura, rellena este cuadro:
Condensador elegido:
Resistencia de carga elegida:
Diodos
V rizado pico a pico teórico.
2.- Determina las señales de rizado, y la señal de continua en la carga
3.- Móntalo también en el ordenador, imprime el circuito con la forma de onda en el
osciloscopio, imprímelo, recorta y pégalo detrás, mide la señal de rizado y de continua en la
carga.
4.- Ahora en el taller inserta un 78XX y mide la señal de rizado y de continua en la carga.
5.- Rellena la siguiente tabla, los cálculos mostrarlos en esta hoja por la parte de atrás (8
puntos)
MEDIDAS
ORDENADOR
CÁLCULOS
V RIZADO pico a pico
Vcc EN LA CARGA
Con 78XX
no hay 78XX
6.- Comenta tus conclusiones
DISEÑO ELECTRONICO ANALOGO
58
PRÁCTICA 10 RECTIFICACIÓN DE POTENCIA
1.- Monta el siguiente circuito en el ordenador. Como resistencia de carga puedes
usar una bombilla, o una resistencia de 1K,fija un ángulo de conducción máximo y
mínimo, y utiliza un potenciómetro para regular la luz, puede ser alrededor de 25K,
y el condensador de 100n, la red 100V y 50HZ. enseña los cálculos en la parte de
atrás. Imprime el circuito cuando tengas una señal de osciloscopio representativa,
tienes que probar diferentes configuraciones, los valores anteriores son
orientativos. Pégalo en la parte de atrás.
2.- Rellena la siguiente tabla:
Áng. cond.
Máximo elegido
Áng. Cond.
Mínimo elegido
C
R
P
3.- Ahora con la información del osciloscopio rellena esta tabla:
Vp DIAC
Vv DIAC
Vp TRIAC
Frecuencia
V RED eficaz
4.- Mide el ángulo de conducción con el potenciómetro al mínimo y al máximo si tienes
potenciómetro y rellena la siguiente tabla
ÁNGULO CONDUCCIÓN
CALCULADO
MEDIDO
ORDENADOR
MÍNIMO
No
MÁXIMO
No
6.- Comenta los resultados
DISEÑO ELECTRONICO ANALOGO
59
9. EL TRANSISTOR DE UNIÓN (BJT).
Como se comentó al comienzo del capítulo, combinando 2 uniones N-P se consigue un
dispositivo con prestaciones mucho más interesantes todavía que las de los diodos vistos
anteriormente. El 17 de diciembre de 1947 puede considerarse la fecha en que John
Bardeen y Walter Brattain culminan los trabajos que conducen a la invención del transistor
de unión. El transistor consiste en 3 bloques de semiconductor dopados N-P-N ó P-N-P.
El primer transistor era de Ge y tipo P-N-P. Actualmente el semiconductor utilizado es
prácticamente siempre Si y son mucho más abundantes los tipos N-P-N que los P-N-P.
En las figuras 9.1 y 9.2 vemos la estructura esquemática respectiva de los 2 tipos de
transistores mencionados. La geometría real de un transistor de los que forman parte de
un chip no se parece mucho a ese esquema, que únicamente nos va a servir para explicar
su funcionamiento de forma sencilla.
a) Esquema b) Símbolo circuito
Figura 9.1 Transistor NPN
a) Esquema b) Símbolo circuito
Figura 9.2 Transistor PNP
El transistor está compuesto por tres zonas de dopado, la zona superior es el Colector,
la zona central es la Base y la zona inferior es el Emisor. El Emisor está muy
impurificado, la Base tiene una impurificación muy baja, mientras que el Colector posee
una impurificación intermedia. En este ejemplo concreto el transistor es un dispositivo
NPN, aunque también podría ser un PNP. En principio es similar a dos diodos. Un
transistor es similar a dos diodos, el transistor tiene dos uniones: una entre el emisor y la
base y la otra entre la base y el colector. El emisor y la base forman uno de los diodos,
mientras que el colector y la base forman el otro.
Estos diodos son denominados: Diodo de emisor (el de la izquierda en este caso) y
Diodo de colector (el de la derecha en este caso).
DISEÑO ELECTRONICO ANALOGO
60
Antes y después de la difusión. Vamos a hacer un estudio del transistor NPN,
primeramente cuando está sin polarizar (sin pilas y en circuito abierto) se produce una
Difusión (como un gas en una botella), donde los electrones cruzan de la zona n a la
zona p, se difunden, encuentran un hueco y se recombinan. Esto hace que en las uniones
entre las zonas n y p se creen iones positivos y negativos
Figura 9.2ª Movimiento electrónico en un transistor.
Esta difusión y recombinación se da hasta llegar al equilibrio, hasta conseguir una barrera
de potencial de 0,7 V (para el Si). Se crean 2 z.c.e., una en la unión E-B (WE) y otra en la
unión C-B. Si se conectan fuentes de tensión externas para polarizar al transistor, se
obtienen resultados nuevos e interesantes. Hay 3 configuraciones:
·
Base común (BC).
·
Emisor común (EC).
·
Colector común (CC).
Cada una de estas configuraciones a su vez puede trabajar en 4 zonas diferentes:
Con esto vemos que el transistor puede trabajar de 12 formas diferentes.
DISEÑO ELECTRONICO ANALOGO
61
Figura 9.2b Diferentes regiones de trabajo de un transistor.
Internamente, el BJT se compone de tres capas de silicio, según la configuración
mostrada en la Figura 9.3.
Figura 9.3: Estructura interna del transistor bipolar
Como puede apreciarse, la flecha que indica el tipo de transistor, apunta al sentido de la
corriente en polarización directa del diodo BE. En principio, parece una estructura
simétrica, en la que es imposible distinguir el emisor del colector. Sin embargo la función
que cumple cada uno es completamente distinta, y en consecuencia, se fabrican con
diferentes características. Por lo tanto no es un componente simétrico.
Un transistor tiene dos formas principales de operación: como un interruptor o como una
resistencia variable.
9.1 TRANSISTOR COMO INTERRUPTOR
La función del transistor como interruptor es exactamente igual que la de un dispositivo
mecánico: o bien deja pasar la corriente, o bien la corta. La diferencia está en que
mientras en el primero es necesario que haya algún tipo de control mecánico, en el BJT la
DISEÑO ELECTRONICO ANALOGO
62
señal de control es electrónica. En la Figura 9.4 se muestra la aplicación al encendido de
una bombilla.
Figura 9.4 El transistor bipolar como interruptor de corriente
En el primer caso, bajo la señal de control adecuada, que es introducida a través de la
base, el transistor se comporta como un circuito abierto entre el emisor y el colector, no
existe corriente y la bombilla estará apagada. En el segundo caso, cambiando la señal de
control, se cierra el circuito entre C y E, y los 12 V se aplican a la bombilla, que se
enciende.
Este funcionamiento entre los estados de corte y conducción se denomina operación en
conmutación. Las aplicaciones típicas de este modo de operación son la electrónica de
potencia y la electrónica digital, en la que los circuitos operan con dos niveles de tensión
fijos equivalentes al
y
lógicos.
9.2 TRANSISTOR COMO RESISTENCIA VARIABLE
En la Figura 9.5 se presenta la comparación entre un potenciómetro y un transistor
colocados en un circuito.
Figura 9.5 Transistor bipolar operando como resistencia variable
Si el valor de la resistencia del potenciómetro se fija en 5 k , la tensión de salida V
OUT
será de 5 V. Al aumentar esta resistencia, la salida también aumentará de valor. Por
DISEÑO ELECTRONICO ANALOGO
63
ejemplo, con 20 k V
OUT
resulta ser 8 V. Modificando el valor del potenciómetro se puede
obtener cualquier valor en la salida comprendido entre 0 V y 10 V, ya que:
Al igual que en el potenciómetro, en el transistor se puede ajustar su resistencia entre
colector y emisor, con la diferencia de que la señal de mando no es mecánica, sino
eléctrica a través de la base. Como se verá más adelante, con una pequeña señal
aplicada en la base puede gobernarse el BJT, con lo que aparece un concepto nuevo: la
amplificación de señales. Esta función es la base de la electrónica analógica, aquella en la
que se procesan señales de tensión respetando su forma de onda temporal.
9.3 PRINCIPIO DE OPERACION
En este apartado se va a trabajar exclusivamente con el transistor NPN. No obstante,
cabe señalar que los razonamientos necesarios para entender el transistor PNP son
completamente análogos, por lo que se deja al lector la tarea de deducir los modelos
característicos de su funcionamiento.
En la Figura 9.3 pueden verse las dos uniones PN del transistor: la unión Base-Emisor
(BE), y la unión Base-Colector (BC). Cada una por separado constituye un diodo, pero la
conjunción de ambas provoca un efecto nuevo, denominado efecto transistor.
Obviamente, el estado global del transistor depende de la polarización, directa (PD) o
inversa (PI), de las dos uniones.
Los casos posibles se adjuntan en la tabla siguiente:
Unión
Unión
Estado
PI
PI
Corte
PD
PD
Saturación
PD
PI
RAN
PI
PD
RAI
Los dos últimos casos, la Región Activa Normal (RAN) y la Región Activa Inversa (RAI)
son conceptualmente similares. Si el transistor fuera simétrico, estaríamos ante la misma
región de funcionamiento, solo que con los terminales intercambiados. Sin embargo el
colector y el emisor se fabrican de forma diferente, precisamente para adaptar su
funcionamiento a la RAN. Por ello no se suele trabajar en la RAI. Una vez aclarado este
punto se va a analizar el funcionamiento en cada región de operación.
9.3.1 REGION DE CORTE
Como elemento básico para la discusión en este apartado se va a emplear el circuito de la
Figura 9.6.
DISEÑO ELECTRONICO ANALOGO
64
Figura 9.6: Transistor BJT polarizado en la región de corte
En el circuito de la Figura 9.6:
·
·
En este caso las dos uniones están polarizadas en inversa, por lo que existen zonas de
depleción en torno a las uniones BE y BC. En estas zonas no hay portadores de carga
móviles, por lo tanto, no puede establecerse ninguna corriente de mayoritarios. Los
portadores minoritarios sí pueden atravesar las uniones polarizadas en inversa, pero dan
lugar a corrientes muy débiles. Por lo tanto, un transistor en corte equivale a efectos
prácticos, a un circuito abierto.
A partir de esta definición, se pueden deducir fácilmente los modelos matemático y
circuital simplificados para este estado. El transistor BJT en la región de corte se resume
en la Figura 9.7
DISEÑO ELECTRONICO ANALOGO
65
Figura 9.7 Modelo del
en corte para señales de continua
Obviamente, en estos modelos no se tiene en cuenta el efecto de las corrientes de fuga
de las dos uniones, y sólo son válidos para realizar una primera aproximación al
comportamiento de un circuito.
EJEMPLO 1: Calcular las tensiones V
BE
, V
BC
y V
CE
así como las corrientes I
B
, I
C
e I
E
del
circuito de la figura 9.8, cuando E
B
= 0 V.
Figura 9.8: Circuito del ejemplo 1
SOLUCIÓN: La base del transistor está conectada a la fuente a través de una resistencia
R
B
. Puesto que la diferencia de potencial entre los extremos del generador es nulo, no
puede polarizarse la unión BE en directa, por lo que el transistor está en corte, es decir:
V
BC
= V
BE
- V
CE
= 0 - 10 = - 10 V
Pueden obtenerse los mismos resultados si se sustituye el transistor en el circuito por su
modelo equivalente:
DISEÑO ELECTRONICO ANALOGO
66
9.3.2 REGION ACTIVA NORMAL
Para facilitar el estudio y comprensión de los fenómenos que suceden cuando se polariza
el transistor en RAN, se va a analizar en primer lugar el comportamiento del transistor en
las situaciones descritas en la Figura 9.9 a) y b).
Figura 9.9: Transistor NPN.
En la Figura 9.9 a), como la tensión E
C
está aplicada al colector, la unión base-colector
estará polarizada en inversa. A ambos lados de la unión se creará la zona de deplección,
que impide la corriente de portadores mayoritarios. No existirá corriente de colector
significativa, y el transistor se encontrará operando en la región de corte.
En el caso de la Figura 9.9 b), la fuente E
B
polariza la unión base-emisor en directa, que
se comporta como un diodo normal, es decir, la zona P inyecta huecos en la zona N, y
esta electrones en aquella. Si el dopado de la base es muy inferior al del emisor, la
inyección de huecos será muy inferior a la de electrones, y se puede describir el proceso
así: el emisor inyecta electrones en la base. Estos se recombinan con los huecos que
provienen de la fuente de alimentación y se crea una corriente I
B
. En este caso el colector
no entra en juego.
DISEÑO ELECTRONICO ANALOGO
67
La operación en RAN se da cuando la unión BE se polariza en directa y la BC en inversa.
Los tres puntos característicos de esta región de operación son:
1. Corriente de colector no nula: conducción a través de la unión BC pese a que está
polarizada en inversa.
2. La corriente de base es muy inferior a la de colector.
3. La corriente de colector es proporcional a la corriente de base.
Figura 9.10 Transistor NPN en RAN.
Conducción a través de la unión BC
En el circuito de la Figura 9.10 la unión BE se polariza en directa, mientras que si E
C
es
mayor que E
B
, la unión BC estará en inversa, luego no debería circular corriente a través
de esta última. Lo que sucede es que el emisor (tipo N) inyecta electrones en la base (tipo
P), en la que los portadores mayoritarios son los huecos, y los minoritarios son los
electrones. Como se explicó anteriormente, una unión PN en inversa bloquea el paso de
mayoritarios, pero no de minoritarios (que constituyen la corriente de fuga en inversa). Por
lo tanto, los electrones inyectados desde el emisor a la base, atraídos por el potencial
positivo aplicado al colector, pueden atravesar la unión BC, y dar origen a la corriente de
colector I
C
. Mediante el emisor, se inunda la base de electrones, aumenta drásticamente
el número de portadores minoritarios del diodo base-colector, con lo que su corriente
inversa aumenta también.
Así que la primera contradicción queda resuelta. El diodo BC no conduce realmente en
inversa, sino que sus corrientes de fuga se equiparan con la corriente normal gracias al
aporte de electrones que provienen del emisor.
La corriente de base es muy inferior a la de colector
En este punto de la explicación surge una pregunta: ¿y por qué los electrones llegan
hasta la unión BC y no se recombinan como en la Figura 9.9.b)? La Figura 9.11 muestra
la distribución de corrientes.
DISEÑO ELECTRONICO ANALOGO
68
Figura 9.11: Distribución de corrientes en un transistor NPN en RAN.
Si la base es estrecha y está poco dopada, es relativamente probable que un electrón la
atraviese sin encontrarse con un hueco. Típicamente, los BJT se construyen para que se
recombine el 1% de los electrones. En este caso se obtiene una ganancia de corriente de
100, es decir, la corriente de base es 100 veces inferior a la del colector. Como la
corriente de emisor es la suma de estas dos, es obvio que su valor es cercano al de la
corriente de colector, con lo que en la práctica se consideran iguales (sólo operando en
RAN).
La corriente de colector es proporcional a la corriente de base
Centrando la atención en la recombinación de los electrones en la base procedentes del
emisor. Allí donde había un hueco pasa a haber, tras la recombinación, un ion negativo
inmóvil. Si desaparecen los huecos de la base y se llena de iones negativos, se carga
negativamente, y se repelen los electrones procedentes del emisor. En este caso se
impediría la circulación de corriente, es decir, es necesario que la corriente de base
reponga huecos para que haya corriente de colector.
Por tanto, por cada electrón recombinado hay que introducir un hueco nuevo que
neutralice la carga negativa. Si la reposición de huecos es lenta (corriente I
B
pequeña), la
DISEÑO ELECTRONICO ANALOGO
69
capacidad de inyectar electrones será baja, debido a la repulsión eléctrica. Este fenómeno
tiene la propiedad de ser aproximadamente lineal, con lo que se puede establecer que:
en donde es un coeficiente adimensional denominado ganancia directa de corriente, o
bien ganancia estática de corriente.
Resumiendo...
El transistor bipolar operando en la RAN se comporta como un amplificador de
corriente. La corriente débil
se reproduce amplificada en un factor
en
.
Los modelos y condición de existencia se presentan en la Figura 9.12. De nuevo hay que reseñar
que se trata de un modelo muy simplificado, que sólo da cuenta de los fenómenos básicos
señalados anteriormente.
Figura 9.12: Modelo del BJT en RAN para señales de continua.
La condición de corriente de base mayor que cero se refiere a corriente entrante en el
dispositivo, es decir, la corriente debe entrar por la base para que el
esté en RAN.
Para los valores habituales de I
B
, la tensión V
BE
se sitúa en torno a los 0,7 V. Por ello, en
muchas ocasiones se toma este valor para realizar un análisis aproximado de los
circuitos.
EJEMPLO 2: En el circuito de la Figura 7 calcular V
BE
, V
BC
y V
CE
así como las corrientes
I
B
, I
C
e I
E
cuando E
B
= 5 V y cuando E
B
= 7 V. La ganancia de corriente del transistor es
F
=
100.
SOLUCIÓN: Al aplicar una diferencia de potencial positiva ( 0,7) a la base se polariza la
unión BE en directa. Además, si E
B
, es inferior a la de la fuente conectada al colector, la
tensión de colector será superior a la de la base, con lo que la unión BC estará polarizada
en inversa. Se dan, por lo tanto, las condiciones necesarias para la operación en RAN,
con lo que se verifica aproximadamente que:
DISEÑO ELECTRONICO ANALOGO
70
;
Estas dos ecuaciones pueden introducirse en el circuito empleando el modelo
equivalente:
Figura 9.13: Análisis del transistor en RAN
El análisis del circuito permite añadir dos ecuaciones nuevas para el cálculo de I
B
, I
C
y
V
CE
:
De la primera expresión se obtiene
:
Teniendo en cuenta que
:
Finalmente:
DISEÑO ELECTRONICO ANALOGO
71
En la tabla siguiente se adjuntan los resultados numéricos de los dos casos requeridos en
el enunciado:
I
B
I
C
I
E
V
BE
V
CE
V
BC
E
B
= 5 V
43 A
4,3 mA
4,343 mA
0,7 V
5,7 V
-5 V
E
B
= 7 V
63 A
6,3 mA
6,363 mA
0,7 V
3,7 V
-3 V
Los resultados obtenidos en el ejemplo 2 sugieren los siguientes comentarios:
·
La tensión V
BC
obtenida en ambos casos es negativa, lo que significa que la
polarización de la unión BC es inversa. Como además la corriente de la base es
positiva queda comprobado que el transistor está operando en RAN.
·
La corriente I
E
tiene un valor muy cercano al de I
C
. En la práctica, sería difícil de
detectar la diferencia entre ambas mediante aparatos de medida convencionales.
Por ello, en ocasiones se realiza la aproximación I
C
= I
E
.
·
Una variación de corriente en la base de tan sólo 20 A provoca una variación en la
tensión V
CE
de 2 V. Este es el principio de la amplificación analógica de señales.
Centremos ahora la atención en la evolución de V
CE
. Cuando el transistor está en corte
V
CE
= 0 V. En la RAN, a medida que aumenta E
B
disminuye V
CE
. Este resultado es lógico,
puesto que I
C
es directamente proporcional a E
B
. Como V
CE
= E
C
- R
C
I
C
, al aumentar el
término negativo disminuye el valor de la resta. Gráficamente puede representarse este
hecho como sigue (Figura 9.14):
Figura 9.14: Evolución de las tensiones y corrientes en el ejemplo 2
Si R
C
fuera una bombilla, en el caso A estaría apagada, mientras que en los casos B y C
proporcionaría luz. Evidentemente, en el caso C la intensidad de la luz será mayor que en
el B, puesto que la tensión aplicada es mayor. Aquí se pone de manifiesto claramente el
funcionamiento del transistor como resistencia variable, ya que el comportamiento entre C
y E es similar al de un potenciómetro: modificando la señal de control convenientemente
podemos variar la tensión de alimentación de la bombilla entre 0 y 10 V.
DISEÑO ELECTRONICO ANALOGO
72
9.3.3 REGION DE SATURACION
Supongamos que tenemos un transistor polarizado en la RAN según el circuito de la
Figura 9.8). En la tabla de resultados del ejemplo 2 queda claro que según aumenta la
tensión E
B
(o bien la corriente I
B
) el valor absoluto de la tensión V
BC
disminuye. Llegará un
momento en el que, si I
B
crece lo suficiente V
BC
cambiará de signo y pasará a ser positiva.
En ese instante, la unión BC dejará de estar polarizada en inversa, y entrará en
polarización directa. La consecuencia es que el colector pierde su capacidad de recolectar
electrones, y la corriente I
C
resulta ser inferior al valor I
B
.
Figura 9.15: Transistor BJT polarizado en la región de saturación
Por otra parte, según se muestra en la Figura 9.15, al estar las dos uniones polarizadas
en directa, la tensión entre el colector y el emisor en saturación será:
V
CE SAT
= V
BE ON
- V
BC ON
Si los diodos BE y BC fueran idénticos, la tensión de conducción de ambos sería
prácticamente igual, y entonces la tensión V
CE SAT
sería nula. Sin embargo, tal y como se
ha comentado anteriormente, el colector y el emisor se fabrican con distintas
características. Normalmente la tensión V
BE ON
es aproximadamente igual a 0,7 V,
mientras que V
BC ON
se sitúa en torno a los 0,5 V. Ello conlleva una tensión cercana a 0,2
V. Dado que la tensión de codo de los diodos permanece prácticamente constante para
las corrientes de operación habituales, la tensión V
CE SAT
es también independiente de las
corrientes I
B
ó I
C
. Con ello el transistor pierde su capacidad de gobierno sobre la corriente
de colector, que será controlada únicamente por el circuito externo.
Análogamente al resto de regiones de funcionamiento, también puede hallarse un modelo
simplificado para realizar cálculos con un transistor polarizado en la región de saturación:
DISEÑO ELECTRONICO ANALOGO
73
Figura 9.16. Modelo simplificado del BJT en saturación
.
Como puede observarse, en este modelo se toma la tensión V
CE SAT
nula, pero podría
considerarse cualquier valor sin más que incluir una fuente de tensión independiente del
valor deseado entre el colector y el emisor.
EJEMPLO 3: En el circuito de la Figura 9.8 calcular V
BE
, V
BC
y V
CE
así como las corrientes
I
B
, I
C
e I
E
cuando E
B
= 15 y 20 V. La ganancia de corriente del transistor es
F
= 100.
SOLUCIÓN: En este caso la tensión aplicada a la base con respecto al emisor es
claramente superior a la aplicada al colector. Por lo tanto el transistor está operando en la
región de saturación. Sustituyendo el modelo correspondiente en el circuito original se
tiene que:
DISEÑO ELECTRONICO ANALOGO
74
En la tabla siguiente se presentan los resultados numéricos para los casos indicados en el
enunciado del problema:
I
B
I
C
I
E
V
BE
V
CE
V
BC
E
B
= 5 V
143 A
10 mA
10,14 mA
0,7 V
0
0,7 V
E
B
= 7 V
193 A
10 mA
10,19 mA
0,7 V
0
0,7 V
La corriente I
C
se mantiene constante en 10 mA, pese a las variaciones de I
B
, puesto que
la tensión V
CE
es ahora constante. Nótese además que en ambos casos se cumple que I
C
es menor que el producto
F
I
B
.
Retomando de nuevo el caso en el que R
C
sea una bombilla, los resultados obtenidos
muestran que ahora la intensidad luminosa será ahora constante, luego se ha perdido la
capacidad de regular, y el dispositivo se comporta ahora como un interruptor cerrado.
A modo de recapitulación, la siguiente figura muestra la evolución global de I
C
con
respecto a E
B
, donde se puede apreciar el paso del transistor por las tres regiones de
operación.
Figura 9.17: Gráfica
frente a
.
9.4 CURVAS CARACTERISTICAS. PUNTO DE OPERACION
Al ser el transistor bipolar un dispositivo triterminal son necesarios seis parámetros para
determinar el estado eléctrico del mismo: tres tensiones y tres corrientes. Aplicando las
leyes básicas de resolución de circuitos pueden presentarse dos ecuaciones:
Por ello, los parámetros independientes se reducen a cuatro. En un circuito determinado y
bajo la acción de unas excitaciones concretas, existirán unos valores de estos cuatro
parámetros que caracterizan por completo el estado del transistor. Dicho cuarteto se
denomina punto de operación (Q).
DISEÑO ELECTRONICO ANALOGO
75
Las curvas características más empleadas en la práctica son las que relacionan V
BE
con I
B
y V
CE
con I
C
e I
B
. Con frecuencia, estas curvas son facilitadas por los fabricantes.
9.4.1 CARACTERISTICA VBE-IB
La función que liga V
BE
con I
B
es la característica de un diodo, y puede aplicarse todo lo
dicho cuando se estudió aquél.
Figura 9.18: Característica I
B
-V
BE
.
La curva representada en la Figura 9.18 sigue la expresión:
9.4.2 CARACTERISTICA VCE-IC
Según lo explicado hasta ahora, la característica V
CE
- I
C
debería ser la siguiente:
Figura 9.19: Característica V
CE
-I
C
ideal.
Idealmente, en la RAN la corriente de colector depende exclusivamente de la de base, a
través de la relación
. Por lo tanto, en el plano
-
, la representación
estará formada por rectas horizontales (independientes de V
CE
) para los diversos valores
DISEÑO ELECTRONICO ANALOGO
76
de I
B
(en este caso se ha representado el ejemplo para
Evidentemente, no se
dibujan más que unos valores de I
B
para no emborronar el gráfico. Para
, la
corriente de colector también debe ser nula. La región de corte está representada por el
eje de abscisas. Por contra, para
el transistor entra en saturación, luego esta
región queda representada por el eje de ordenadas.
Hasta aquí se presenta la característica ideal, pero como era de esperar, la realidad es un
poco más compleja (Figura 9.20):
Figura 9.20: Característica
-
real.
Las diferencias son claras:
·
En la RAN la corriente de colector no es totalmente independiente de la tensión
colector-emisor. Para valores altos de la corriente cobra importancia la resistencia
interna del transistor.
·
La región de saturación no aparece bruscamente para
, sino que hay una
transición gradual. Típicamente se suele considerar una tensión de saturación
comprendida entre 0,1 V y 0,3 V.
9.4.3 PRINCIPALES PARAMETROS COMERCIALES
Entre los numerosos datos que suministran los fabricantes de componentes electrónicos,
con respecto a los transistores
cabe destacar los siguientes:
·
Tensión máxima en entre colector y emisor, colector-base y emisor-base (V
CEO
,
V
CBO
y V
EBO
): son las tensiones máximas a las que se puede someter a los
terminales del transistor. Tensiones mayores pueden provocar una ruptura en
inversa y la destrucción del transistor.
·
Corriente continua máxima de colector,
: es la corriente máxima que puede
circular por el colector sin que el transistor sufra ningún daño.
·
Ganancia de corriente en DC (DC Current Gain): se suele especificar la ganancia
para varios puntos de operación, incluso pueden ser suministradas las gráficas de
DISEÑO ELECTRONICO ANALOGO
77
la ganancia en función de la corriente de colector. La fluctuación de su valor es
debida a los efectos de segundo orden.
·
Tensiones de saturación V
CE(sat)
, V
BE(sat)
: son las tensiones que aparecen entre los
terminales en la región de saturación.
·
Potencia máxima disipable (Total Device Dissipation):
es
la potencia máxima que puede disipar el transistor sin sufrir ningún daño.
Además es habitual facilitar la influencia de la temperatura en el funcionamiento del
transistor.
9.5 MODELOS DELTRANSISTOR BIPOLAR
Existen dos tipos principales de señales aplicadas al transistor BJT:
·
Señales de continua
·
Señales de alterna de pequeña amplitud que oscilan respecto a un punto de
operación en RAN
En este apartado se presentan modelos del transistor BJT válidos para el análisis de
ambas situaciones. En primer lugar se presenta el modelo de Ebers-Moll, con el que
puede realizarse el cálculo de las corrientes y tensiones de polarización de un transistor
sea cual fuere su región de operación. A partir de las ecuaciones dictadas por este
modelo, se deducen posteriormente las expresiones necesarias para el análisis de
señales de alterna de pequeña amplitud, a través del modelo de parámetros híbridos.
9.5.1 MODELO DE EBERS-MOLL
Hasta ahora se han presentado los modelos parciales para cada una de las regiones de
funcionamiento (corte, saturación, RAN) del transistor bipolar. Sin embargo, existe un
modelo estático general válido para las tres regiones: el modelo de Ebers-Moll.
El modelo está basado en el hecho de que un transistor BJT se compone de dos uniones
PN, la unión base-emisor y la unión base-colector. Por lo tanto se puede expresar las
corrientes del transistor como la superposición de las corrientes en las dos uniones PN.
En la Figura 9.21 se muestra la notación empleada durante este apartado.
Figura 9.21: Notaciones empleadas en este apartado
DISEÑO ELECTRONICO ANALOGO
78
Considerando el modelo ideal para los diodos BE y BC se tiene que:
Donde I
CS
, I
ES
son las corrientes de saturación de ambos diodos.
Sin embargo, el comportamiento del transistor es más complejo que el de dos diodos
conectados en serie. Se debe tener el cuenta el efecto transistor descrito en el capítulo 2:
debido a que las uniones se encuentran muy próximas entre sí se produce una interacción
electrónica entre ellas.
En la Figura 9.22 se muestra el modelo de Ebers-Moll para un transistor NPN. Este se
compone de dos diodos de unión PN y dos fuentes de intensidad dependientes.
Figura 9.22: Modelo de Ebers-Moll para el transistor bipolar NPN.
El efecto transistor viene caracterizado por las fuentes de corriente dependientes. Como
se ha explicado, parte de la corriente I
DBE
, que circula por la unión base-emisor es
atrapada por la unión base-colector. Este hecho se modela mediante la fuente de
corriente a
F
I
DBE
. a
F
es un parámetro característico de cada transistor que toma valores
próximos a la unidad.
De igual manera, parte de la corriente I
DBC
atraviesa la región de base para alcanzar el
emisor. Esto se modela con la fuente de corriente a
R
I
DBC
. Debido a que la estructura de un
transistor no es simétrica, sino que está optimizada para obtener valores altos de a
F
, a
R
es
generalmente pequeña (desde 0.02 a 0.5).
Además, aplicando las leyes de la física de semiconductores se obtiene la condición de
reciprocidad, que se concreta en la siguiente expresión:
DISEÑO ELECTRONICO ANALOGO
79
I
S
toma valores entre 10
-14
y 10
-15
A para transistores de baja potencia.
Si se aplica la ley de los nudos en el emisor, el colector y la base
Se puede sustituir en esta ecuación las corrientes de los diodos I
DBE
y I
DBC
. Además, si se
definen las constantes b
F
y b
R
de manera que
Las ecuaciones anteriores, resultan
que son las ecuaciones de las intensidades en los tres terminales del transistor NPN
según el modelo de Ebers-Moll. Estas ecuaciones son válidas para cualquier región de
funcionamiento.
Aún siendo un modelo complejo del transistor, el modelo de Ebers-Moll no describe todos
los efectos que tienen lugar en el dispositivo. Los llamados efectos de segundo orden
como la tensión de ruptura en inversa de las uniones PN, o la dependencia de I
C
con V
CE
no están incluidos en este modelo.
9.5.2 APLICACION DEL MODELO DE EBERS-MOLL A LA REGION ACTIVA NORMAL
En este apartado se van a simplificar las ecuaciones de Ebers-Moll, deducidas en el
apartado anterior para el caso de que el transistor se encuentre funcionando en la RAN.
Como ya se ha comentado, el funcionamiento en la RAN de un transistor se caracteriza
por tener la unión PN polarizada en directa (con V
BE 0.7V) y la unión base colector polarizada en inversa (VBC
0). Obsérvese que bajo estas condiciones las expresiones exponenciales de las
ecuaciones de Ebers_Moll se pueden simplificar
DISEÑO ELECTRONICO ANALOGO
80
Y las ecuaciones quedan reducidas a:
Como el segundo sumando de estas ecuaciones suele ser despreciable frente al valor de
I
B
, I
C
e I
E
, a partir de las ecuaciones B. y C., se puede obtener la relación
Que concuerda con la deducida en el apartado 9.2.
9.5.3 MODELO HIBRIDO Se presenta el modelo híbrido del transistor BJT, uno de los
más ampliamente utilizados para el análisis de las pequeñas señales de alterna. Para la
deducción del mismo se consideran las siguientes hipótesis:
·
Transistor polarizado en RAN
·
Oscilaciones alternas de baja amplitud y baja frecuencia
9.5.3.1 Expresiones generales
Según se ha indicado en el apartado 3, el punto de operación de un transistor bipolar
viene indicado por cuatro variables eléctricas. De entre las diversas opciones posibles,
para la deducción del modelo híbrido se escogen como variables independientes la
corriente I
B
y la tensión V
CE
, mientras que las dependientes son V
BE
e I
C
. De este modo,
las ecuaciones características del transistor vendrán dadas por dos funciones f
1
y f
2
tales
que:
Las tensiones y corrientes de un punto de polarización concreto vendrán dadas por las
expresiones anteriores:
DISEÑO ELECTRONICO ANALOGO
81
Supongamos que sobre este punto de operación Q se añade una componente alterna,
caracterizada por un I
B
y por un V
CE
. Para calcular el V
BE
y el I
C
pueden sustituirse las
funciones f
1
y f
2
en las cercanías del punto Q por las tangentes respectivas en dicho
punto. Como se trata de funciones de dos variables independientes, las expresiones
serán las siguientes:
A partir de este momento, para simplificar la notación se escribirán con letra minúscula los
incrementos de las variables. La expresión anterior admite una representación matricial:
En
donde los coeficientes h
ij
se llaman parámetros híbridos, puesto que tienen diferentes
unidades entre sí.
·
h
ie
: Impedancia de entrada ()
·
h
re
: Ganancia inversa de tensión
·
h
fe
: Ganancia directa de corriente, o ganancia dinámica
·
h
oe
: Admitancia de salida (
-1
)
9.5.3.2 Cálculo de los parámetros híbridos
Para el cálculo de los parámetros h
ij
se van a emplear las expresiones resultantes del
modelo de Ebers-Moll para la RAN.
·
Función f
1
=
·
Función f
2
=
DISEÑO ELECTRONICO ANALOGO
82
Tal y como puede observarse, los coeficientes h
re
y h
oe
son nulos según estos cálculos.
Este resultado refleja las limitaciones del modelo de Ebers-Moll propuesto, ya que en
realidad h
re 5 x 10
-5
y h
oe
6 x 10
-6
-1
. Sin embargo, su valor es tan pequeño que en muchos
casos son aceptables las expresiones obtenidas anteriormente.
9.5.3.3 Representación gráfica
El modelo híbrido, con las simplificaciones mostradas en el subapartado anterior, admite
la siguiente representación gráfica:
Figura 9.23: Modelo híbrido para pequeñas señales de alterna
9.6 EJEMPLO DE APLICACION: EL AMPLIFICADOR DE SEÑALES ALTERNAS
El mundo está lleno de pequeñas señales que necesitan amplificarse para procesar la
información que contienen. Por ejemplo: una guitarra eléctrica. El movimiento de una
cuerda metálica en el interior de un campo magnético (creado por los captadores o
pastillas) provoca una pequeña variación de tensión entre dos terminales de una bobina.
Para que esa débil señal pueda llegar a los oídos de todo un auditorio, es evidente que se
necesita una amplificación. La señal producida por la pastilla de la guitarra viaja por un
par de terminales hasta el amplificador. Aquí se produce la transformación de la pequeña
señal, que es capaz ahora de excitar la membrana de un altavoz con la potencia que se
desee.
Para que se pueda oír lo que se toca realmente, la amplificación debe cumplir ciertas
condiciones:
1. Debe respetar la forma de onda de la tensión de entrada. Si no lo hace así, se
produce una distorsión, una pérdida de la información que aporta.
2. La energía absorbida de la fuente que emite la onda que se desea amplificar ha de
ser mínima. El circuito amplificador necesita una fuente de alimentación propia.
El esquema más sencillo de amplificador de señales es el propio transistor bipolar.
DISEÑO ELECTRONICO ANALOGO
83
Figura 9.24: Circuito con un transistor bipolar.
Si el transistor se encuentra en la RAN, hay una relación lineal entre
e
:
Como
es reflejo de la entrada e
lo es de la salida, este esquema proporciona una
ganancia en corriente. Sin embargo presenta dos limitaciones muy importantes:
1. Sólo amplifica la parte positiva de la señal: Cuando
es menor que 0,7 V Q pasa
al estado de corte, con lo que
.
2. Requiere señales de tensión grandes, por lo menos mayores que 0,7 V, ya que la
señal de entrada ha de polarizar en directa la unión BE y llevar el transistor a la
RAN.
Con este dispositivo sólo se puede trabajar con señales positivas mayores de 0,7 V. Por
lo tanto no es capaz de amplificar señales de alterna. La figura siguiente representa
aproximadamente la respuesta que se obtendría al tratar señales de alterna:
DISEÑO ELECTRONICO ANALOGO
84
Figura 9.25: Corrientes en el circuito de la Figura 9.24.
9.7 POLARIZACION DEL TRANSISTOR Q A TRAVES DE LA BASE
Figura 9.26: Transistor polarizado a través de la base.
Este esquema presenta la novedad de la resistencia R
B
. Gracias a ella, la base se
polariza mediante la fuente de alimentación E
C
y no mediante
. La corriente que llega a
la base proviene de dos fuentes:
DISEÑO ELECTRONICO ANALOGO
85
·
: Es la señal que queremos amplificar, por lo tanto, será variable en el tiempo.
·
: Esta corriente es la suministrada por E
C
, que es una fuente de continua, para la
polarización del transistor.
La intensidad de colector será, si Q está en la RAN:
Finalmente, puede calcularse la tensión de salida
:
La siguiente figura ayuda a comprender mejor estos conceptos.
DISEÑO ELECTRONICO ANALOGO
86
Figura 9.27: Tensiones y corrientes en el circuito de la Figura 9.26.
La onda de salida es, efectivamente, proporcional a la entrada, pero está desplazada en
el eje de las Y, es decir, tiene una componente de continua que ha sido introducida por
la fuente de polarización del transistor.
LOGROS DEL ESQUEMA:
1. El transistor es también capaz de amplificar la parte negativa de la señal.
2. La tensión de entrada puede ser pequeña, ya que ahora el transistor se polariza a
través de una fuente de alimentación ajena a la entrada.
3. En la salida se dispone de una señal de tensión, gracias a R
C
, que cumple dos
misiones:
o
Transforma
en una tensión
.
o
Junto con R
B
lleva el transistor a la RAN.
DISEÑO ELECTRONICO ANALOGO
87
INCONVENIENTES:
1. Al conectar directamente el generador de señal a la entrada, I
B
iría a tierra a través
de él. Esto podría dañar el generador (en el ejemplo de la introducción, las
pastillas o captadores de la guitarra eléctrica)
2. Al conectar directamente la salida a la carga (altavoz), I
C
iría a tierra a través de
ella, dañándola.
Los inconvenientes de este esquema están introducidos por la corriente continua de
polarización. Estas corrientes deben quedar limitadas al interior del dispositivo
amplificador.
a. EL CONDENSADOR DE ACOPLAMIENTO
El condensador es un componente que se comporta como un circuito abierto para la
corriente continua. Por medio de él, se aísla tanto la entrada como la salida de las
componentes de continua. Si elegimos correctamente el valor de la capacidad de acuerdo
con la frecuencia a la que se espera que trabaje el dispositivo, se logra además que estos
condensadores se comporten como un cortocircuito para las señales de alterna que se
quieren amplificar. En cualquier caso, la respuesta frecuencial del amplificador queda
limitada por los valores de C
1
y C
2
.
Figura 9.28: Esquema amplificador con condensadores de acoplamiento.
Una vez visto el esquema básico de un amplificador, se enuncian los parámetros más
importantes de éste:
·
: Señal de entrada (pequeña señal AC).
·
: Corriente de entrada, que se absorbe del generador de señal de entrada
(AC).
·
: Señal de salida (AC).
DISEÑO ELECTRONICO ANALOGO
88
·
,
: Corrientes de polarización del transistor (DC).
·
,
: Resistencias de polarización.
·
: Carga sobre la que se aplica la tensión de salida.
·
: Aísla la entrada del circuito de la polarización en continua.
·
: Aísla la salida del circuito de la polarización continua.
b. GANANCIA Y RESISTENCIA DE ENTRADA DE UN AMPLIFICADOR
El esquema presentado es sólo una de las posibles soluciones válidas para la
amplificación de señales. Para comparar las características de todos ellos, se definen dos
parámetros de AC: la ganancia en tensión y la resistencia de entrada:
Ganancia en tensión:
Es el cociente entre la señal de salida y la aplicada al dispositivo. Normalmente, la
ganancia depende de la carga que se conecte (
).
Nótese que en este parámetro se relacionan las amplitudes de las señales alternas
entrada y de salida y no los valores instantáneos. Se da por supuesto que el circuito va a
mantener en gran medida la similitud de las formas de onda, y de lo que se trata es de
cuantificar la magnitud de la amplificación. (El grado de distorsión de la señal de salida
con respecto a la de entrada se valora mediante otros parámetros).
Resistencia de entrada:
La resistencia de entrada da una idea de la cantidad de corriente que absorbe la fuente de
señal que se desea amplificar (no hay que confundir la con la fuente de alimentación del
amplificador). Dado que interesa absorber poca energía de la fuente, el amplificador será
tanto mejor cuanto mayor sea su resistencia de entrada.
Puesto que la señal de entrada es alterna, estamos de nuevo ante un parámetro que
relaciona las amplitudes de las oscilaciones de las magnitudes eléctricas implicadas
c. METODO DE CÁLCULO
Cuando todos los componentes de un circuito responden a ecuaciones lineales, se puede
aplicar el principio de superposición. En este caso, los transistores no son
DISEÑO ELECTRONICO ANALOGO
89
componentes lineales. Sin embargo, teniendo en cuenta que las señales aplicadas son de
baja amplitud, el transistor opera soportando pequeñas oscilaciones con respecto a unas
magnitudes continuas, luego sí que es posible aplicar la superposición teniendo en cuenta
el punto de operación:
1. Cálculo del punto de operación DC: Se sustituyen los condensadores por
circuito abierto. A continuación se introduce el modelo DC del transistor en RAN y
se calculan los valores de las corrientes y tensiones de polarización.
2. Determinación del modelo AC del transistor: Ha de emplearse el modelo de
pequeñas señales, particularizando para en los resultados del punto 1.
3. Estudio del circuito en AC. En este estudio las componentes de continua no
afectan a la relación de las amplitudes de las ondas AC. Por consiguiente pueden
cortocircuitarse las fuentes de tensión continua. Si el diseño del circuito es
correcto, los condensadores pasan a comportarse como cortocircuitos.
d. EJEMPLO DE CÁLCULO
A continuación se aplica este procedimiento al cálculo de
y
en el último esquema
presentado, en su funcionamiento en vacío.
1) Punto de operación DC
Figura 9.29: Esquema equivalente DC del circuito Figura 9.28.
Según el circuito equivalente DC:
DISEÑO ELECTRONICO ANALOGO
90
2) Parámetros del modelo equivalente AC
Los parámetros del modelo AC son la resistencia de entrada
y la ganancia dinámica
de corriente
.
;
3) Estudio AC
La figura 24 muestra el esquema equivalente del circuito para las señales de alterna.
Figura 9.30: Circuito equivalente AC
La resistencia R
B
está conectada por un terminal a la fuente de señales y a la base, y por
el otro a la fuente de alimentación E
C
. Idealmente, esta fuente no ofrece ningún obstáculo
para las señales de alterna (si su resistencia interna es nula), se comporta como un
cortocircuito que conecta R
B
con tierra. En el lado derecho del esquema, R
C
se une por
una parte con el colector del transistor, y por la otra con tierra a través de la fuente de
alimentación.
Es de vital importancia que se tenga en cuenta que en este esquema sólo se relacionan
las amplitudes de las ondas, y no sus valores instantáneos.
Los valores de r
IN
y A
V
pueden obtenerse a partir del esquema de la figura 9.25.
DISEÑO ELECTRONICO ANALOGO
91
Como
:
Nótese que para el cálculo de los parámetros r
IN
y A
V
no es necesario definir el valor de
v
IN
, ya que en ambos casos se calcular variaciones de una magnitud con respecto a esa
tensión de entrada.
ETAPAS DE AMPLIFICACION ESTABILIZADAS
El esquema de la Figura 9.28 presenta un claro problema de inestabilidad: La tensión de
la base depende directamente de la corriente de base. Cualquier pequeña variación
debido a la influencia de la temperatura sobre la resistencia R
B
modificará el punto de
operación, y con él la ganancia. El esquema de la Figura 9.31 incluye dos mejoras con
respecto al anterior:
·
Polarización de la base a través de un divisor de tensión.
·
Estabilización mediante resistencia de emisor.
Figura 9.31: Circuito amplificador estabilizado.
Las funciones de estos subcircuitos son:
DISEÑO ELECTRONICO ANALOGO
92
·
Divisor de tensiones: Mediante una correcta selección de las resistencias
y
puede conseguirse que la corriente
sea muy superior a
. Entonces, la
tensión de la base quedará fijada únicamente por el valor de las resistencias del
divisor.
·
Resistencia de emisor (
): Un aumento de la corriente de colector provocará
una elevación de la tensión de emisor. Con ello, como la tensión de base es fija, la
tensión base emisor disminuirá, la corriente de base también y finalmente, la
corriente de colector volverá a su valor de diseño. El condensador se encarga de
cortocircuitar esta resistencia en alterna.
RESUMEN PUNTO DE OPERACIÓN:
En un proceso de diseño o de análisis de un amplificador es necesario conocer la
respuesta del sistema tanto en DC como en AC. La selección del punto de trabajo Q
de un transistor se realiza a través de diferentes circuitos de polarización que fijen sus
tensiones y corrientes. En la figura 9.31a se incluyen los circuitos de polarizacion mas
típicos basados en resistencias y fuentes de alimentación; además, se indican las
ecuaciones que permiten obtener el punto de trabajo de los transistores. Estos
circuitos presentan diferencias en algunos casos importantes.
Por ejemplo, el circuito de la con polarización de tensión de base constante es poco
recomendable por carecer de estabilidad; bajo ciertas condiciones se puede producir
deriva térmica que autodestruye el transistor. La polarización de corriente de base de
la figura 9.31a es mucho más estable aunque el que más se utiliza con componentes
discretos es el circuito de autopolarización. La polarización de colector-base asegura
que el transistor nunca entra en saturación al mantener su tensión colector-base
positiva.
Retomando el tema de límites de operación de un transistor, ya visto en el capítulo
anterior, se habló del punto Q, ó punto de reposo. También, establecíamos que el
punto de operación para los amplificadores a transistor, es el resultante de la corriente
de DC y el voltaje sobre las características que define la región que será empleada
para la amplificación de la señal aplicada.
DISEÑO ELECTRONICO ANALOGO
93
Figura 9.31a Algunos circuitos de polarización del transistor
DISEÑO ELECTRONICO ANALOGO
94
Figura 9.31b Distintos puntos de operación
De la figura 9.31b tenemos los valores máximos para IC y VCE, como también la
curva de potencia máxima. Asimismo, están definidas las zonas de saturación
donde VCE
VCEsat y la de corte donde IB
0
µ
A. El dispositivo BJT o transistor
puede operar fuera de estos límites máximos pero su vida útil se disminuye
considerablemente o simplemente el dispositivo se destruirá.
9.8 EJERCICIOS DE APLICACION
Circuito de polarización fija: Veamos el circuito de la siguiente figura, VBB es la
misma VCC, pero para describir mejor el circuito se muestran por separado:
Figura 9.31c Polarización fija
Realicemos un análisis de la malla de entrada:
DISEÑO ELECTRONICO ANALOGO
95
Recta de carga (malla de salida):
Figura 9.31d Recta de carga para polarización fija.
Hemos dicho que el transistor podía trabajar como un amplificador y también como
un conmutador:
· Conmutación: SATURACIÓN y CORTE.
· Amplificación: ACTIVA.
DISEÑO ELECTRONICO ANALOGO
96
Como hemos dicho anteriormente, el valor de IB depende de la RB, por lo tanto
podemos controlar la posición del punto Q variando el valor de la RB.
Analicemos brevemente la estabilidad de este circuito de polarización de base:
Circuito de polarización estabilizada por emisor: Si se quiere amplificar, se
necesitan circuitos cuyos puntos Q sean inmunes a los cambios en la ganancia de
corriente, esto es, interesa que el punto Q sea lo más estable posible. Para este
propósito ahora se analizará el Circuito de polarización de Emisor, que es el
siguiente:
Figura 9.31e BJT polarizado estabilizado en emisor.
El propósito es amplificar, por esa razón el transistor tiene que trabajar en la zona
ACTIVA. Como estamos en activa VBE = 0.7 V. Por lo tanto y viendo la malla de
entrada la tensión VC será de 4.3 V. Entonces la intensidad IE por la resistencia
RE será de:
La malla de salida:
DISEÑO ELECTRONICO ANALOGO
97
Gráficamente:
Figura 9.31f Grafica de BJT polarizado en emisor.
¿Qué ocurre si el
cc varía? Si
cc = 150 solo varía IB.
Varía la IB pero lo demás se mantiene y Q no varía, el transistor se autorregula y
hace que varíe IB sin que nada más varíe, por lo tanto: El punto Q es muy
estable. Pero esto no es del todo exacto, porque algo varía, esto se verá si no se
usa la aproximación de IC = IE. Sin esta aproximación tenemos:
DISEÑO ELECTRONICO ANALOGO
98
Y ahora si influye el
cc.
Y tendríamos: VCE = 8,77 V, con
cc = 150:
Con
cc = 50:
Varía algo, pero es bastante estable, es bueno para trabajar en activa.
Polarización por divisor de voltaje: Este tema es una continuación del anterior,
por ello primeramente vamos a hacer un breve resumen de lo visto antes para
situarnos mejor en el tema. Hasta ahora hemos visto estos circuitos:
· Circuito de polarización de base (resistencia en la base).
· Circuito de polarización de emisor (resistencia en emisor).
En este tema analizaremos este último circuito más que ningún otro.
DISEÑO ELECTRONICO ANALOGO
99
Figura 9.31g Polarización por divisor de voltaje
Pero es muy caro instalar 2 fuentes de alimentación por eso se suele modificar el
circuito de tal forma que solo se use una fuente de alimentación. Como se ha
dicho ahora nos ahorraremos una fuente de alimentación.
Figura 9.31h Circuito equivalente para polarización por divisor de voltaje.
Ahora se mueve lo de la izquierda hacia arriba y como tenemos 10 V en los dos
lados se pueden unir:
DISEÑO ELECTRONICO ANALOGO
100
Figura 9.31i Polarización por división de voltaje.
Y así nos hemos ahorrado una fuente de alimentación, este es el Circuito de
polarización por división de tensión.
Análisis aproximado
Así despreciamos IB:
EJEMPLO: Aplicamos valores numéricos a lo que hemos hecho.
DISEÑO ELECTRONICO ANALOGO
101
Vemos si la aproximación es buena: se tiene que cumplir:
Tiene que funcionar bien para los tres valores del ECG.
Para comprobarlo vamos a ver la recta de carga de continua.
DISEÑO ELECTRONICO ANALOGO
102
¿Qué curva de IB pasa por ese punto Q? Si cambiamos el transistor, Q es el
mismo pero varía la IB. No cambia la recta de carga ni el punto Q, lo que cambia
es la IB, se Auto adapta. El punto Q es muy estable, prácticamente no cambia de
sitio, para hacer los cálculos no hemos usado la
, solo para la IB.
Polarizaciones DC con retroalimentación de voltaje: Polarización DC con
retroalimentación de emisor. En este circuito la resistencia de realimentación es
RE.
Haremos la prueba de desestabilizar el punto Q.
IC intenta aumentar mucho. Pero al aumentar la IC, aumenta la VE.
DISEÑO ELECTRONICO ANALOGO
103
Entonces vemos que se da un fenómeno de autorregulación, intenta aumentar
mucho pero al final aumenta menos. Aunque no se estabiliza, se desestabiliza
menos, esa auto corrección se llama realimentación.
A este efecto de que una variable de salida afecte a la entrada se le llama
realimentación, la salida afecta a la entrada, se auto corrige. Además se le llama
Realimentación negativa porque un aumento supone una disminución. Si un
aumento supusiera otro aumento sería una Realimentación positiva. En
amplificadores es muy importante la realimentación, como se verá más adelante.
Seguimos analizando el circuito. Malla de entrada:
EJEMPLO: Para ver como se mueve el punto Q. VCC = +15 V RC = 910 W
RB = 430 W RE = 100 W VBE = 0,7 V
Recta de carga:
DISEÑO ELECTRONICO ANALOGO
104
Se ha movido mucho pero menos que el anterior.
Cuanto menor sea este resultado, mejor será el circuito, esto sirve para comparar
circuitos. Para mejorar el circuito se puede hacer:
Se suele coger 100 veces mayor RE.
Veamos si se cumple en este circuito.
No se cumple. RE debería ser RE = 430 k . Pero poner RE = 430 k hace que
casi toda la tensión de VCC vaya a RE y la VCE es pequeña, y el circuito entra en
saturación y no funciona como amplificador, el remedio es peor.
Diversas configuraciones de polarización: Circuito de polarización con
realimentación de colector. El circuito es el siguiente:
Figura 9.31h Polarización con retroalimentación de colector.
Veamos cómo se comporta la Tª.
DISEÑO ELECTRONICO ANALOGO
105
Y la IC aumenta menos de lo que pretendía, realimentación negativa, se ha
compensado en parte. Malla de entrada:
Hacemos como antes:
Recta de carga. Malla de salida:
Si los comparamos:
· Circuito de polarización por realimentación de emisor: = 6...mA
· Circuito de polarización por realimentación de colector: = 3.81 mA
Este último es mejor por ahora. De antes teníamos:
Para que se mueva lo menos posible, el b tiene que afectar lo menos posible,
interesa que RC influya más que RB/
, para eso:
DISEÑO ELECTRONICO ANALOGO
106
RC normalmente no se puede elegir. Entonces la RB se elegirá la menor posible.
Hay que recordar que en le circuito anterior de realimentación de emisor si
cogíamos RB muy pequeña se saturaba. En este circuito, a medida que disminuya
RB se iba acercando a saturación, no se saturaba pero se acercaba mucho. Por
eso no es útil, porque se acerca mucho a saturación (aunque nunca llegue a los
VCE = 0.2 V de saturación). ¿Qué debería hacer para que Q estuviera centrado?
Para que esto ocurra:
No se pueden cumplir los dos, si está centrado no es estable y viceversa. Y este
circuito no es bueno por esa razón, aunque sea mejor que los anteriores, es
todavía bastante inestable.
Operaciones de diseño: Retomando la polarización con divisor de voltaje pero
teniendo en cuenta la retroalimentación. En todo circuito que quiera que se auto
compense tiene que haber una resistencia de realimentación, en este caso es RE,
que hace que sea estable el punto Q.
DISEÑO ELECTRONICO ANALOGO
107
Figura 9.31h Retroalimentación en emisor y polarización por divisor de voltaje.
Veamos cómo se comporta si variamos la temperatura o cambiamos de transistor
(C.T.).
De esta forma se compensa en parte la IC, se mueve pero menos. Es un circuito
muy bueno, la compensación no es total pero casi, es una compensación muy
buena. Este circuito es el que se utiliza mayoritariamente por ser bueno, barato y
efectivo. Lo analizaremos como siempre de 2 formas: Análisis aproximado y
exacto.
Primeramente modificaremos un poco el circuito: Ahora aplicaremos Thévenin:
Figura 9.31i Análisis de retroalimentación.
Aproximamos: RTH = 0. Malla de entrada:
DISEÑO ELECTRONICO ANALOGO
108
El punto Q es estable. Tenemos lo ideal, no está la
. Lo único que varía algo es la
VBE, pero es una variación pequeña respecto a VTH, entonces es casi constante
la IC.
Aprovechamos lo calculado anteriormente:
Interesa que RTH/
influya poco respecto a RE. Hacemos RE 100 veces mayor
que RTH/
.
Pero es difícil que se cumpla esto porque RTH es el paralelo de R1 y R2, y de
estas dos resistencias la más pequeña suele ser R2, entonces si aproximamos
para verlo mejor:
DISEÑO ELECTRONICO ANALOGO
109
Para que esto funcione correctamente hemos dicho que se tiene que cumplir lo
siguiente:
Pero si pongo R2 muy pequeño, la IR2 es grande y es aproximadamente IR1 y esa
intensidad va a la F.A., entonces el condensador y los diodos de la F.A. tienen que
resistir mucha intensidad y podría dar problemas. Otro problema se da en alterna:
Figura 9.31j Retroalimentación con señal AC.
Cuando amplificamos la onda es muy importante la impedancia de entrada (Zi) y
tiene que ser de un valor concreto. Su valor es:
No se puede hacer la Zi todo lo pequeña que se quiera y eso es una dificultad, se
estropea la Zi en alterna. Hay situaciones que debemos analizar:
· El consumo
· La Zi
Para resolver eso los diseñadores en lugar de 0,01RB*
suelen escoger un poco
mayor, 0,1RE*
.
Y así Q es bastante estable, aunque no sea tanto como antes.
EJEMPLO:
DISEÑO ELECTRONICO ANALOGO
110
Figura 9.31k Ejemplo de retroalimentación
Como siempre aplicamos Thévenin y calculamos IB e IC para los distintos valores
de
.
Ahora calculamos el VCE y dibujamos la gráfica:
DISEÑO ELECTRONICO ANALOGO
111
Vemos que el punto Q varía muy poco para distintos valores de b. Esto lo vemos
con la variación de IC.
Para ver la estabilidad del circuito estudiaremos el caso más crítico, que es el valor
más pequeño de b, si se cumple para este valor se cumple en todos los demás
casos.
No se cumple el muy estable, veamos ahora el Bastante Estable.
Es bastante estable porque se cumple la ecuación, esto quiere decir que esta
bastante bien diseñado el circuito.
Circuito de polarización con realimentación de emisor y realimentación de colector
Con este circuito se intenta obtener polarizaciones más estables para los circuitos
con transistores. Para ello se usa una combinación de una resistencia de emisor y
una resistencia de colector.
DISEÑO ELECTRONICO ANALOGO
112
Figura 9.31l BJT en configuración de retroalimentación en emisor y colector.
Para que sea estable se tiene que cumplir:
Pero el problema es que si RC y RE son muy grandes el valor de VCE tiene que
ser pequeño y puede llegar a saturación, por eso no se puede hacer todo lo
grande que se quiera.
DISEÑO ELECTRONICO ANALOGO
113
PRÁCTICA 11 POLARIZACION DEL TRANSISTOR BIPOLAR
1.- Diseña los siguientes circuitos de polarización para un determinado punto de operación, antes
rellena esta tabla de la elección del punto Q, elige los valores que creas convenientes
2.- Móntalo en el taller, y en el computador, realiza todas las medidas necesarias para
rellenar la tabla siguiente, a la hora de imprimir el circuito, imprimirlo con los valores de los
amperímetros y voltímetros, elabora los cálculos y también añádelos a la práctica, pero no hojas
sueltas.
Polarización fija:
Vcc
Vce
Vbe
Vrc
Vrb
Ib
Ic
Ie
TEÓRICO
PRÁCTICO
SIMULADOR
Polarización con realimentación en el emisor:
Vcc
Vce
Vbe
Vrc
Vre
Vrb
Ib
Ic
Ie
TEÓRICO
PRÁCTICO
SIMULADOR
Polarización con realimentación en el colector:
Vcc
Vce
Vbe
Vrc
Vrb
Vr2
Ib
Ic
Ie
TEÓRICO
PRÁCTICO
SIMULADOR
Polarización por divisor de tensión:
Vcc
Vce
Vbe
Vrc Vre
Vr1
Vr2
I
1-2
Ib
Ic
Ie
TEÓRICO
PRÁCTICO
SIMULADOR
DISEÑO ELECTRONICO ANALOGO
114
PRACTICA 12 TRANSISTOR EN CONMUTACIÓN
1.- Diseña Rb y Re en el circuito de la figura de tal manera que el transistor este
en sobresaturación cuando se cierre el interruptor.
Hay que tener en cuenta la resistencia del RELÉ que es aproximadamente 10
(mídelo con
el polímetro) y la hfe del transistor que utilices (mídelo también), la fuente de alimentación
Vcc no es necesario que sea de 25V, puede ser otro valor, igualmente con la Vb
2.- Móntalo en el taller,
no es necesario que
realices el circuito de la
derecha (la de alterna),
es sólo un ejemplo para
que veas como desde un
elemento de pequeña
potencia, (la pila y el
interruptor de la derecha,
que
pueden
ser
perfectamente
puertas
lógicas
o
cualquier
circuito digital como un
puerto de un ordenador)
se puede controlar un
circuito de alta potencia
(el de la izquierda)
3.- Dibújalo en el simulador, y observa su funcionamiento, imprímelo y pégalo detrás.
4.- contesta a las siguientes preguntas:
¿Qué función tiene el diodo en paralelo con la bobina del relé?
Quizás no dispongas de dos fuentes de alimentación ¿Cómo se soluciona el problema?
Basándote en este circuito ¿Podrías diseñar un temporizador?
DISEÑO ELECTRONICO ANALOGO
115
PRÁCTICA 13 AMPLIFICADOR CON BJT
1.- Realiza un diseño de amplificador con BJT, realimentado por emisor, y con divisor de
tensión en la base como la figura, los valores son libres, el proceso de diseño mostrarlo en
la hoja de atrás o en hoja aparte, junto con los valores de las tensiones en la base, emisor y
colector continuas, transistor del apéndice B
2.- Móntalo y realiza las mediciones de la ganancia en el osciloscopio, y realiza las medidas
de Vb, Ve, Vc con el polímetro o con el osciloscópio.
3.- Realiza igual con el ordenador, tomando las mismas medidas, imprime el osciloscopio
y el circuito con los voltímetros que utilices, imprímelos con sus valores, y pégalo atrás.
4.- Rellena la siguiente tabla
CALCULADOS
MEDIDOS
ORDENADOR
GANANCIA
Vc
Vb
Ve
ENSEÑA LOS CÁLCULOS DE DISEÑO EN LA PARTE DE ATRAS (10 puntos)
5.- Comenta los resultados obtenidos
DISEÑO ELECTRONICO ANALOGO
116
10. LOS TRANSISTORES DE EFECTO DE CAMPO
En el capítulo de transistores bipolares, hemos visto que una pequeña corriente de base
controla una corriente de colector muy superior. Los transistores de efecto de campo son
dispositivos triterminales en los que la corriente principal se controla mediante una
tensión. Las características principales son:
·
La potencia de control es nula, es decir, no se absorbe corriente por el terminal de
control.
·
Una señal muy débil puede controlar el dispositivo.
·
La tensión de control se emplea para crear un campo eléctrico.
Hay dos familias de transistores de efecto de campo: los JFET y los MOSFET. Pese a que
el concepto básico de los FET se conocía ya en 1930, estos dispositivos sólo empezaron
a fabricarse comercialmente a partir de la década de los 60. Y a partir de los 80 los
transistores de tipo MOSFET han alcanzado una enorme popularidad. Comparados con
los BJT, los transistores MOS ocupan menos espacio, es decir, dentro de un circuito
integrado puede incorporase un número mayor. Además su proceso de fabricación es
también más simple. Además, existe un gran número de funciones lógicas que pueden
ser implementadas únicamente con transistores MOS (sin resistencias ni diodos). Esto ha
hecho del transistor MOS el componente estrella de la electrónica digital.
Aquí se explica el principio de funcionamiento de ambos tipos de dispositivos, así como
sus modelos circuitales elementales.
10.1 TRANSISTOR DE EFECTO DE CAMPO DE UNION (JFET)
Un JFET de canal N se fabrica difundiendo una región de tipo P en un canal de tipo N, tal
y como se muestra en la Figura 10.1. A ambos lados del canal se conectan los terminales
de fuente (S, Source) y drenaje (D, Drain). El tercer terminal se denomina puerta (G,
Gate).
Figura 10.1: Esquema del transistor JFET de canal N
Los símbolos de este tipo de dispositivos son:
DISEÑO ELECTRONICO ANALOGO
117
Figura 10.2: Símbolos de los transistores JFET
Las explicaciones incluidas en este capítulo se refieren fundamentalmente al transistor
NJFET, teniendo en cuenta que el principio de operación del PJFET es análogo.
10.1.1 PRINCIPIO DE OPERACION DEL NJFET
A continuación se explica cómo se controla la corriente en un JFET. Al igual que sucede
con los transistores BJT el JFET tiene tres regiones de operación:
·
Región de corte
·
Región lineal
·
Región de saturación
Es preciso hacer notar que en este caso, la saturación alude a un fenómeno
completamente distinto al de los transistores BJT.
1.1.1 Región de corte
Centremos nuestra atención en la Figura 10.1. La zona de tipo P conectada a la puerta
forma un diodo con el canal, que es de tipo N. Como se recordará, cuando se forma una
unión PN aparecen en los bordes de la misma una zona de deplección en la que no hay
portadores de carga libres. La anchura de dicha zona depende de la polarización
aplicada. Si esta es inversa, la zona se hace más ancha, proporcionalmente a la tensión
aplicada. Aplicando una tensión V
GS
negativa aumentamos la anchura de la zona de
deplección, con lo que disminuye la anchura del canal N de conducción.
Si el valor de V
GS
se hace lo suficientemente negativo, la región de agotamiento se
extenderá completamente a través del canal, con lo que la resistencia del mismo se hará
infinita y se impedirá el paso de I
D
(Figura 10.3). El potencial al que sucede este fenómeno
se denomina potencial de bloqueo (Pinch Voltage, V
P
).
DISEÑO ELECTRONICO ANALOGO
118
Figura 10.3: Esquema del transistor JFET de canal N polarizado con la tensión de
bloqueo
Por lo tanto, para valores más negativos que V
P
el transistor NJFET se encuentra
polarizado en la región de corte, y la corriente de drenaje resulta ser nula.
1.1.2 Región lineal Si en la estructura de la Figura 10.1 se aplica una tensión V
DS
mayor
que cero, aparecerá una corriente circulando en el sentido del drenaje a la fuente,
corriente que llamaremos I
D
. El valor de dicha corriente estará limitado por la resistencia
del canal N de conducción. En este caso pueden distinguirse dos situaciones según sea
V
DS
grande o pequeña en comparación con V
GS
.
1.1.2.1 Valores pequeños del voltaje drenaje-fuente
La Figura 10.4 presenta la situación que se obtiene cuando se polariza la unión GS con
una tensión negativa, mientras que se aplica una tensión entre D y S menor.
Figura 10.4:Esquema del transistor JFET de canal N polarizado con V
GS
0
DISEÑO ELECTRONICO ANALOGO
119
Por el terminal de puerta (G) no circula más que la corriente de fuga del diodo GS, que en
una primera aproximación podemos considerar despreciable. La corriente I
D
presenta una
doble dependencia:
·
La corriente I
D
es directamente proporcional al valor de V
DS
·
La anchura del canal es proporcional a la diferencia entre V
GS
y V
P
. Como I
D
está
limitada por la resistencia del canal, cuanto mayor sea V
GS
- V
P
, mayor será la
anchura del canal, y mayor la corriente obtenida.
Los dos puntos anteriores se recogen en la siguiente expresión:
Por lo tanto, en la región lineal obtenemos una corriente directamente proporcional a V
GS
y
a V
DS
.
1.1.2.2 Valores altos del voltaje drenaje-fuente
Para valores de V
DS
comparables y superiores a V
GS
la situación cambia con respecto al
caso anterior: la resistencia del canal se convierte en no lineal, y el JFET pierde su
comportamiento óhmico. Veamos por qué sucede esto.
Cuando se aplica un voltaje V
DS
al canal de 5 voltios, por ejemplo, este se distribuye a lo
largo del canal, es decir, en las proximidades del terminal D la tensión será de 5 V, pero a
medio camino la corriente circulante habrá reducido su potencial a la mitad (2,5 V), y en el
terminal S el potencial será nulo. Por otra parte, si V
GS
es negativa (- 2 V, por ejemplo), la
tensión se distribuirá uniformemente a lo largo de la zona P, al no existir ninguna corriente
(Figura 10.5). (NOTA: se desprecia la caída de tensión en las zonas situadas por debajo
de los contactos).
Figura 10.5: Esquema del transistor JFET de canal N polarizado con V
GS
= -2 V y V
DS
= 5 V
DISEÑO ELECTRONICO ANALOGO
120
Sigamos adelante. En las proximidades del terminal S la tensión inversa aplicada es de 2
V, que se corresponde con la V
GS
= -2 V. Sin embargo, conforme nos acercamos a D esta
tensión aumenta: en la mitad del canal es de 4,5 V, y en D alcanza 7 V. La polarización
inversa aplicada al canal no es constante, con lo que la anchura de la zona de
deplección tampoco lo será (Figura 10.6). Cuando V
DS
es pequeña, esta diferencia de
anchuras no afecta a la conducción en el canal, pero cuando aumenta, la variación de la
sección de conducción hace que la corriente de drenaje sea una función no lineal de V
DS
,
y que disminuya con respecto a la obtenida sin tener en cuenta este efecto.
Figura 10.6: Esquema del transistor JFET de canal N en la región de conducción no
lineal
1.1.3 Región de saturación
Si V
DS
se incrementa más, se llegará a un punto donde el espesor del canal en el extremo
del drenaje se acerque a cero. A partir de ese momento, la corriente se mantiene
independiente de V
DS
, puesto que los incrementos de tensión provocan un mayor
estrechamiento del canal, con lo que la resistencia global aumenta (Figura 10.7).
DISEÑO ELECTRONICO ANALOGO
121
Figura 10.7: Esquema del transistor JFET de canal N en la región de corriente
constante
La región de saturación se da cuando se estrangula el canal en el drenaje, lo que sucede
cuando la tesión puerta-drenaje es más negativa que V
P
, es decir:
V
GD
V
P
= V
GS
- V
DS
V
P
= V
DS
V
GS
- V
P
Antes de seguir adelante, comparemos las figuras Figura 10.3 y Figura En el caso del
bloqueo, todo el canal resulta afectado por la zona de deplección, que es constante
porque la tensión V
GS
se aplica uniformemente a lo largo de la unión. En cambio, en la
región de corriente constante sólo parte del canal ha llegado al bloqueo (provocado por
V
DS
, que varía a lo largo del mismo), y es lo que permite la circulación de la corriente.
1.2 CURVAS CARACTERISTICAS
Son dos las curvas que se manejan habitualmente para caracterizar los transistores JFET.
En primer lugar, en la representación de I
D
frente a V
GS
, para una V
DS
dada, se aprecia
claramente el paso de la región de corte a la de saturación (Figura 8). En la práctica sólo
se opera en el segundo cuadrante de la gráfica, puesto que el primero la V
GS
positiva hace
crecer rápidamente I
G
.
Figura 10.8: Característica V
GS
- I
D
del transistor NJFET
En la característica V
DS
- I
D
del transistor NJFET se observa la diferencia entre las
regiones lineales y de saturación (Figura 10.9). En la región lineal, para una determinada
V
GS
, la corriente crece proporcionalmente a la tensión V
DS
. Sin embargo, este crecimiento
se atenúa hasta llegar a ser nulo: se alcanza el valor de saturación, en donde I
D
sólo
depende de V
GS
.
DISEÑO ELECTRONICO ANALOGO
122
Figura 10.9: Característica V
DS
- I
D
del transistor NJFET
Nótese que, según esta gráfica, la región de saturación del JFET se identifica con la
región activa normal de los transistores bipolares. Mientras que en RAN la corriente de
colector sólo depende de la de base, aquí la magnitud de control es la tensión V
GS
. Por el
contrario, si la resistencia del JFET en la región lineal es muy pequeña puede encontrarse
un cierto paralelismo entre las regiones lineal de JFET y de saturación del BJT.
1.3 PARAMETROS COMERCIALES
Se presenta a continuación algunas de las características de los transistores JFET que
ofrecen los fabricantes en las hojas de datos:
·
I
DSS
: Es la corriente de drenaje cuando el transistor JFET se encuentra en
configuración de fuente común y se cortocircuita la puerta y la fuente (V
GS
=0). En
la práctica marca la máxima intensidad que puede circular por el transistor.
Conviene tener en cuenta que los transistores JFET presentan amplias
dispersiones en este valor.
·
V
P
(Pinch-Off Voltage): es la tensión de estrangulamiento del canal. Al igual que
I
DSS
, presenta fuertes dispersiones en su valor.
·
R
DS(ON)
: Es el inverso de la pendiente de la curva I
D
/V
DS
en la zona lineal. Este
valor se mantiene constante hasta valores de V
GD
cercanos a la tensión de
estrangulamiento.
·
B
VDS
(Drain-Source Breakdown Voltage): es la tensión de ruptura entre fuente y
drenaje. Tensiones más altas que B
VDS
provocan un fuerte incremento de I
D
.
·
B
VGS
(Gate-Source Breakdown Voltage): es la tensión de ruptura de la unión entre
la puerta y la fuente, que se encuentra polarizada en inversa. Valores mayores de
B
VGS
provocan una conducción por avalancha de la unión.
1.4 MODELOS DEL TRANSISTOR NJFET
Análogamente a lo efectuado con el transistor bipolar se van a presentar dos modelos
para el JFET: uno para analizar el funcionamiento del transistor JFET con señales
continuas y otro para las señales alternas aplicadas sobre un punto de operación de la
región de saturación.
DISEÑO ELECTRONICO ANALOGO
123
En primer lugar se presentan los modelos para las diferentes regiones de operación, a
saber, corte, saturación y zona lineal. A partir de las ecuaciones dictadas por este modelo,
se deducen posteriormente las expresiones necesarias para el análisis de señales de
alterna de pequeña amplitud.
1.4.1 Modelo estático ideal Para el transistor NJFET, el modelo viene representado en la
Figura 10.10 El valor de I
D
depende de la región de funcionamiento del transistor.
Figura 10.10: Esquema circuital del modelo del transistor JFET
1. Región de corte: la condición de la región de corte es que el canal esté
completamente estrangulado en las proximidades de la fuente, lo que sucede
cuando la tensión puerta-fuente alcance la tensión de estrangulamiento (V
GS
V
P
).
En este caso I
D
=0.
2. Región lineal: es la región en que se produce un incremento de la intensidad I
D
al
aumentar V
DS
. Este incremento es lineal para bajos valores de V
DS
aunque la
linealidad se pierde cuando V
DS
se acerca a -V
P
. Para trabajar en la región lineal
se deben dar dos condiciones:
o
V
GS
V
P
o
V
GD
V
P
V
GS
V
P
+ V
DS
Estas condiciones equivalen a admitir que el canal de conducción no se estrangula por la
zona de deplección en inversa tanto en el extremo de drenaje como en la fuente. El valor
que toma la corriente I
D
es
1. Región de saturación: la región de saturación tiene lugar cuando la tensión entre
drenador y puerta alcanza la tensión de estrangulamiento. Para que ello ocurra, el
canal N, tiene que estar estrangulado en el extremo cercano al drenaje, pero no en
el extremo del canal cercano a la fuente. Entonces, al igual que en el caso
anterior, deben ocurrir dos condiciones:
o
V
GS
V
P
o
V
GD
V
P
V
GS
V
P
+ V
DS
DISEÑO ELECTRONICO ANALOGO
124
En este caso la intensidad I
D
ya no depende de V
DS
, siendo su expresión
Por lo general, en los transistores NJFET tanto V
P
como V
GS
toman valores negativos,
mientras que V
DS
e I
DSS
son positivos, tomando la dirección I
D
tal y como aparece en el
modelo.
1.4.2 MODELO PARA SEÑALES ALTERNAS
Para la deducción del mismo se consideran las siguientes hipótesis:
·
Transistor polarizado en la región de saturación
·
Oscilaciones alternas de baja amplitud y baja frecuencia
1.4.2.1 Expresiones generales De entre las diversas opciones posibles, para la
deducción del modelo se escogen como variables independientes las tensiones V
GS
y V
DS
,
mientras que las dependientes son las corrientes I
G
e I
D
. De este modo, las ecuaciones
características del transistor vendrán dadas por dos funciones f
1
y f
2
tales que:
Las tensiones y corrientes de un punto de polarización concreto vendrán dadas por las
expresiones anteriores:
Supongamos que sobre este punto de operación Q se añade una componente alterna,
caracterizada por un V
GS
y por un V
DS
. Las oscilaciones de las corrientes pueden
calcularse como:
A partir de este momento, para simplificar la notación se escribirán con letra minúscula los
incrementos de las variables. La expresión anterior admite una representación matricial:
DISEÑO ELECTRONICO ANALOGO
125
en donde los coeficientes y
ij
se llaman parámetros admitancia.
·
y
is
: Admitancia de entrada (
-1
)
·
y
rs
: Admitancia de transferencia inversa (
-1
)
·
y
fs
: Transconductancia (
-1
). Se suele nombrar como g
m
·
y
os
: Admitancia de salida (
-1
)
1.4.2.2 Cálculo de los parámetros admitancia
Para el cálculo de los parámetros y
ij
se van a emplear las expresiones resultantes del
modelo estático para la región de saturación.
·
Función f
1
=
·
Función f
2
=
La representación circuital de este modelo simplificado responde al mismo esquema
presentado en la Figura 10.10.
10.2 TRANSISTOR MOSFET
Las prestaciones del transistor MOSFET son similares a las del JFET, aunque su principio
de operación y su estructura interna son diferentes. Existen cuatro tipos de transistores
MOS:
·
Enriquecimiento de canal N
·
Enriquecimiento de canal P
·
Empobrecimiento de canal N
·
Empobrecimiento de canal P
DISEÑO ELECTRONICO ANALOGO
126
Los símbolos son:
Figura 10.11: Transistores MOSFET
La característica constructiva común a todos los tipos de transistor MOS es que el
terminal
de
puerta
(G)
está
formado
por
una
estructura
de
tipo
Metal/Óxido/Semiconductor. El óxido es aislante, con lo que la corriente de puerta es
prácticamente nula, mucho menor que en los JFET. Por ello, los MOS se emplean para
tratar señales de muy baja potencia.
2.1 PRINCIPIO DE OPERACION
De entre todos los tipos de transistores MOS existentes se va a analizar el principio de
funcionamiento de dos de ellos: los NMOS de enriquecimiento y empobrecimiento.
2.1.1 NMOS de enriquecimiento
En la Figura 12 se presenta el esquema de un MOS de canal N de enriquecimiento.
DISEÑO ELECTRONICO ANALOGO
127
Figura 10.12: Esquema del transistor NMOS de enriquecimiento
Supongamos que se aplica una tensión V
DS
mayor que cero mientras que V
GS
se
mantiene en cero. Al aplicar una tensión positiva a la zona N del drenaje, el diodo que
forma éste con el sustrato P se polarizará en inversa, con lo que no se permitirá el paso
de corriente: el MOS estará en corte.
Sigamos suponiendo, y pensemos ahora que aplicamos un potencial V
GS
positivo,
mientras mantenemos la V
DS
positiva también. La capa de aislante de la puerta es muy
delgada, tanto que permite al potencial positivo aplicado repeler a los huecos y atraer a
los electrones del material P. A mayor potencial aplicado, mayor número de electrones
será atraído, y mayor número de huecos repelido. La consecuencia de este movimiento
de cargas es que debajo del terminal G se crea un canal negativo, de tipo N, que pone en
contacto el drenaje con la fuente. Por este canal puede circular una corriente.
Recapitulando, por encima de un valor positivo V
GS
= V
TH
se posibilita la circulación de
corriente I
D
(Figura 10.13). Nos encontramos ante una región de conducción lineal.
Figura 10.13: Esquema del transistor NMOS de enriquecimiento en conducción
Si el valor de V
DS
aumenta, la tensión efectiva sobre el canal en las proximidades del
drenaje (V
GS
- V
DS
) va disminuyendo, con lo que el canal se estrecha en dicha zona, y se
DISEÑO ELECTRONICO ANALOGO
128
pierde la linealidad en la relación I
D
- V
DS
. Finalmente se llega a una situación de
saturación similar a la que se obtiene en el caso del JFET.
2.1.2 NMOS de empobrecimiento
En la Figura 10.14 se presenta el esquema de un MOS de canal N de empobrecimiento.
Figura 10.14: Esquema del transistor NMOS de empobrecimiento
En este caso el canal ya está creado. Por lo tanto, si con V
GS
= 0 aplicamos una tensión
V
DS
aparecerá una corriente de drenaje I
D
. Para que el transistor pase al estado de corte
será necesario aplicar una tensión V
GS
menor que cero, que expulse a los electrones del
canal.
Figura 10.15: Esquema del transistor NMOS de empobrecimiento en corte
También en este caso, la aplicación de una V
DS
mucho mayor que V
GS
provoca una
situación de corriente independendiente de V
DS
.
DISEÑO ELECTRONICO ANALOGO
129
2.2 CURVAS CARACTERISTICAS
Con los transistores MOS se manejan dos tipos de gráficas: la característica V
GS
- I
D
, con
V
DS
constante, y la V
DS
- I
D
con V
GS
constante.
2.2.1 Transistor NMOS de enriquecimiento
Figura 10.16: Característica V
GS
- I
D
del transistor NMOS de enriquecimiento
En la Figura 10.16 se pone de manifiesto cómo la intensidad I
D
aumenta bruscamente
cuando se supera la tensión umbral V
TH
(Threshold Voltage) y se crea el canal. Es un
componente idóneo para conmutación, puesto que pasa de un estado de corte a uno de
conducción a partir de un valor de la señal de control. En los dispositivos con el terminal
de puerta de aluminio y el aislante de óxido de silicio, la tensión umbral está en torno a los
cinco voltios.
Figura 10.17: Característica V
DS
- I
D
del transistor NMOS de enriquecimiento
DISEÑO ELECTRONICO ANALOGO
130
La característica V
DS
- I
D
del transistor NMOS de enriquecimiento es muy similar a la del
JFET, pero los valores de V
GS
cambian: en este caso la conducción se da para voltajes
positivos por encima del umbral.
2.2.2 Transistor NMOS de empobrecimiento
Figura 10.18: Característica V
GS
- I
D
del transistor NMOS de enriquecimiento
El NMOS de empobrecimiento puede funcionar también como transistor de
enriquecimiento. Si la tensión V
GS
se hace positiva se atraerán electrones al canal.
Además, a diferencia de los JFET, la impedancia de entrada continua siendo muy
elevada.
Figura 10.19: Característica V
DS
- I
D
del transistor NMOS de empobrecimiento
DISEÑO ELECTRONICO ANALOGO
131
2.3 PARAMETROS COMERCIALES
Los parámetros comerciales más importantes del transistor MOS son análogos a los de
los JFET presentados en el apartado 1.3.
2.4 MODELOS CIRCUITALES
Tal y como se ha visto, las curvas de funcionamiento de los transistores MOS son
similares a las de los JFET. Por ello, todos admiten una representación circuital análoga.
2.4.1 MODELO ESTÁTICO DE SCHICHMAN-HODGES
El modelo estático del transistor MOSFET se denomina modelo de Schichman-Hodges.
Es un modelo muy parecido al modelo de los transistores JFET, descrito anteriormente. El
circuito equivalente se compone de un interruptor abierto y una fuente de intensidad
(Figura 20) cuyo valor I
D
depende de la región de funcionamiento del transistor.
Figura 10.20: Modelo de Schichman-Hodges para el transistor FETMOS
Para el transistor NMOS de enriquecimiento las regiones de funcionamiento son:
1. Región de corte
o
Condición V
GS
V
TH
o
Intensidad I
D
=0
1. Región lineal.
o
Condiciones: V
GS
V
TH
V
GD
V
TH
V
GS
V
TH
+V
DS
·
Intensidad:
Donde K es una constante que depende del material y de las dimensiones del transistor
DISEÑO ELECTRONICO ANALOGO
132
·
m
e
es la movilidad de los electrones, que depende del material y la temperatura
·
W, L son la anchura y la longitud del canal. Factores geométricos que dependen
del diseño del transistor.
·
C'
OX
es la capacidad por unidad de superficie del condensador que forman el metal
de la puerta con el canal. Depende fuertemente del espesor del óxido de puerta.
1. Región de saturación
o
Condiciones V
GS
V
TH
V
GD
V
TH
V
GS
V
TH
+V
DS
·
Intensidad:
2.4.2 MODELO PARA SEÑALES ALTERNAS
Para el caso en el que el transistor soporte señales alternas de pequeña amplitud y baja
frecuencia sobre un punto de polarización en región de saturación, puede demostrarse de
forma análoga a como se ha realizado para el transistor JFET que la transconductancia g
m
se calcula a través de la siguiente expresión
MOSFET DE ENRIQUECIMIENTO:
El MOSFET E difiere del MOSFET D en que no tiene la capa delgada de material n
sino que requiere de una tensión positiva entre la compuerta y la fuente para
establecer un canal. Este canal se forma por la acción de una tensión positiva
compuerta a fuente, v
GS
, que atrae electrones de la región de sustrato ubicada entre el
drenaje y la compuerta contaminados de tipo n. Una v
GS
positiva provoca que los
electrones se acumulen en la superficie inferior de la capa de oxido. Cuando la tensión
alcanza el valor de umbral, V
T
, han sido atraídos a esta región los electrones
suficientes para que se comporte como canal n conductor. No habrá una corriente
apreciable i
D
hasta que v
GS
excede V
T
.
La longitud del canal del MOSFET E depende de las limitaciones dimensionales de las
mascaras fotográficas usadas en el proceso de difusión durante la manufactura, y el
canal es muy estrecho.
DISEÑO ELECTRONICO ANALOGO
133
DISEÑO ELECTRONICO ANALOGO
134
MOSFET DE ENRIQUECIMIENTO
MOSFET V
Es un tipo especial de MOSFET E con una estructura física que permite la operación
con corriente más elevada y voltaje drenaje-fuente más alto que el MOSFET E
convencional. Así el MOSFET V es particularmente apropiado para el uso de alta
potencia y compite exitosamente con transistores bipolares de potencia en muchas
aplicaciones de amplificación y conmutación este dispositivo es de enriquecimiento y
carece de canal entre drenaje y la fuente hasta que la compuerta se hace positiva con
respecto a la fuente. El MOSFET V tiene dos conexiones de fuente y el canal se
induce verticalmente a lo largo de ambos lados del corte en V entre el drenaje
(Sustrato n
+
,en donde n
+
indica un mayor nivel de dopado que n
-
) y las conexiones de
fuente, creando un canal relativamente ancho. La longitud del canal se establece por
el espesor de las capas, que se controla por densidades de dopado y tiempo de
difusión, más que por las dimensiones de las mascaras. La forma en V hace posible
que existan canales muchos más cortos y amplios que en el MOSFET E convencional.
Los canales más cortos y amplios en el MOSFET V permiten corrientes más altas y,
de este modo una disipación de potencia más elevada. LA respuesta en frecuencia
también mejora considerablemente.
MOSFET DE COMPUERTA DUAL
Puede ser un MOSFET del tipo de empobrecimiento o de enriquecimiento. La única
diferencia es que tiene dos compuertas. Sabemos que una desventaja de los FET es
su alta capacitancia de entrada, que restringe sus uso a frecuencias mas altas.
Mediante el empleo de un dispositivo de compuerta dual se reduce la capacitancia de
entrada, haciendo así bastante útil al dispositivo en aplicaciones de amplificación de
RF de alta frecuencia. Otra ventaja del arreglo en compuerta dual es que permite una
entrada de control automático de ganancia (CAG) en algunos amplificadores de RF.
DISEÑO ELECTRONICO ANALOGO
135
CARACTERÍSTICAS DE LOS CIRCUITOS MOSFET:
-
Velocidad de Operación 50 ns.
-
Margen de Ruido 1.5 V
-
Factor de Carga 50
-
Consumo de Potencia 0.1 mW
10.3 APLICACIONES DE LOS TRANSISTORES DE EFECTO DE CAMPO
3.1 EN ELECTRONICA ANALOGICA
Para estas aplicaciones se emplean transistores preparados para conducir grandes
corrientes y soportar elevadas tensiones en estado de corte.
·
Resistencias variables de valor gobernable por tensión (variando la anchura del
canal).
·
Amplificadores de tensión, especialmente en la amplificación inicial de señales de
muy baja potencia.
·
Control de potencia eléctrica entregada a una carga.
En el caso de la amplificación los circuitos se diseñan para que el punto de operación DC
del MOS se encuentre en la región de saturación. De este modo se logra una corriente de
drenaje dependiente sólo de la tensión V
GS
.
3.2 EN ELECTRONICA DIGITAL
Los MOS se emplean a menudo en electrónica digital, debido a la capacidad de trabajar
entre dos estados diferenciados (corte y conducción) y a su bajo consumo de potencia de
control. Para esta aplicación se emplean dispositivos de muy baja resistencia, de modo
que idealmente pueda considerarse que:
·
La caída de tensión en conducción es muy pequeña.
·
La transición entre el estado de corte y el de conducción es instantánea.
Desde su aparición los MOSFET son muy usados, porque aseguran una distorsión más
baja, al controlar el desprendimiento térmico que se produce durante el procesado de la
señal. Alguna de las aplicaciones son:
En un sistema de neutralización de aguas residuales se usan circuitos con MOSFET.
El objetivo de este sistema es el tratamiento de desechos el cual se hace a través de
las mediciones del PH de agua el cual se ajusta a un valor neutro de 7. Las soluciones
con valores de PH menores que 7 son ácidas, y aquellas con valores de PH mayores
que 7 son básicas. Los detectores de PH están situados en tres puntos, y las salidas
DISEÑO ELECTRONICO ANALOGO
136
de los detectores son modificadas por los circuitos detectores con MOSFET los cuales
aceptan los voltajes de los detectores de PH y lo convierten a forma digital mediante
convertidores analógico-digital. El controlador usa los datos digitales para neutralizar
el agua mediante el control de la cantidad de ácido o base que se agrega, y los
valores de PH se muestran en las lecturas de los paneles digitales. Dado que los
detectores de PH tienen una alta resistencia de salida, en los circuitos de detección de
PH se utilizan dispositivos MOSFET, debido a su alta resistencia de entrada. Cada
salida de un MOSFET es proporcional al valor medio de PH, y es cambiada a un
número digital por los convertidores A/D.
LAS MEMORIAS EPROM, o Memorias sólo de Lectura Reprogramables, se
programan mediante impulsos eléctricos y su contenido se borra exponiéndolas a la
luz ultravioleta (de ahí la ventanita que suelen incorporar este tipo de circuitos), de
manera tal que estos rayos atraen los elementos fotosensibles, modificando su
estado. Las EPROM se programan insertando el chip en un programador de EPROM.
Y aplicando en un pin especial de la memoria una tensión entre 10 y 25 Voltios
durante aproximadamente 50 ms, según el dispositivo, al mismo tiempo se direcciona
la posición de memoria y se pone la información a las entradas de datos. Este proceso
puede tardar varios minutos dependiendo de la capacidad de memoria.
La memoria EPROM, se compone de un arreglo de transistores MOSFET de Canal N
de compuerta aislada. En la figura se observa el transistor funcionando como celda de
memoria en una EPROM.
-
Vista de la Ventanita de una EPROM
DISEÑO ELECTRONICO ANALOGO
137
Celda de memoria de una EPROM
Las EPROMs también emplean como transistores de puerta dual o FAMOS (Floating Gate
Avalanche-Injection Metal-Oxide Semiconductor) de cargas almacenadas.
Estos transistores son similares a los transistores de efecto de campo (FETs) canal-P,
pero tienen dos compuertas. La compuerta interior o flotante esta completamente rodeada
por una capa aislante de dióxido de silicio; la compuerta superior o compuerta de control
es la efectivamente conectada a la circuitería externa.
Inicialmente, la puerta flotante esta descargada, y el transistor se comporta como un
transistor MOS normal. No obstante, mediante un equipo programador, se puede
acumular carga en la puerta flotante aplicando una sobre tensión a la puerta y al drenador
del transistor. Esta acumulación de electrones en la segunda puerta tiene el efecto de
aumentar el umbral del transistor a un valor tal que no conduce aunque se direccione la
celda. Así pues la cantidad de carga eléctrica almacenada sobre la compuerta flotante
determina que el bit de la celda contenga un 1 o un 0.
FAMILIA MOS
Los transistores de la tecnología MOS (Metal Oxide Semiconductors) son transistores de
efecto de campo a los que llamamos MOSFET, la gran mayoría de los circuitos integrados
digitales MOS se fabrican solamente con este tipo de transistores.
El MOSFET tiene varias ventajas: es muy simple, poco costoso, pequeño y consume muy
poca energía. Los dispositivos MOS ocupan mucho menos espacio en un CI que los BJT,
un MOSFET requiere de 1 milésimo cuadrado del área del CI mientras que un BJT ocupa
50 milésimos del área del CI. Esta ventaja provoca que los circuitos integrados MOS
estén superando por mucho a los bipolares en lo que respecta a la integración a gran
escala (LSI, VLSI). Todo esto significa que los CI MOS pueden tener un número mucho
mayor de elementos en un solo substrato que los circuitos integrados bipolares.
La velocidad de este tipo de tecnología es relativamente lenta cuando se compara con los
BJT, esto se puede considerar como una de sus principales desventajas.
Los CI digitales MOS utilizan exclusivamente MOSFET de incremento, además nos
interesa utilizarlos solamente como interruptores al igual que se usan los BJT en la familia
TTL.
DISEÑO ELECTRONICO ANALOGO
138
En los MOSFET canal N, el voltaje de la compuerta a la fuente VGS es el voltaje que
determina si el dispositivo esta en ENCENDIDO o en APAGADO. Cuando VGS = 0 V, la
resistencia del canal es muy alta de 1010 , o sea, que no existe un canal conductor entre
la fuente y el drenaje ya que para propósitos prácticos esto es un circuito abierto. Mientras
VGS sea cero o negativo el dispositivo permanecerá apagado. Cuando VGS se hace
positivo, en particular un valor mayor al voltaje de umbral (VT) que por lo general es de
1.5 V, el MOSFET conduce. En este caso el dispositivo esta encendido y la resistencia del
canal entre la fuente y el drenaje es de 1 k . El MOSFET canal P opera exactamente
igual excepto que emplea voltajes de polaridad opuesta. Para encender los P-MOSFET,
debe aplicarse un voltaje VGS negativo que exceda VT.
Los circuitos integrados P-MOS y N-MOS tiene una mayor densidad de integración por lo
que son más económicos que los CMOS. Los N-MOS son más comunmente utilizados
que los P-MOS, ya que son dos veces más rápidos y tienen cerca de dos veces la
densidad de integración de los P-MOS.
En las siguientes figuras se muestran un inversor N-MOS, una NAND N-MOS y una NOR
N-MOS.
En el circuito del inversor tenemos que Q1 siempre esta en el estado de encendido y
actúa
como una resistencia de carga RENC = 100 k . El transistor Q2 cambiara a
apagado o encendido en respuesta al voltaje de entrada VEN.
Con VEN = 0 V, Q2 está apagado con VEN = 5 V. Q2 esta encendido y el voltaje de salida
está en su nivel BAJO.
En la compuerta NAND Q1 actúa como una resistencia de carga, mientras que Q2 y Q3
son los interruptores controlados por las entradas A y B. Si A o B esta en su nivel BAJO
(0V), el transistor está apagado y X esta en su nivel ALTO (+5 V). Cuando A y B están en
1 lógico, Q2 y Q3 están encendidos de modo que X esta en un 0 lógico.
La compuerta NOR utiliza Q2 y Q3 como interruptores paralelos con Q1. Cuando A o B
esta en 1 lógico, el MOSFET correspondiente esta encendido, lo que provoca en la salida
un nivel BAJO. Sólo cuando ambas entradas estan en 0 V, Q2 y Q3 estan apagados y la
salida es ALTA.
CARACTERÍSTICAS DE LOS CIRCUITOS MOS
Velocidad de Operación 50 ns.
Margen de Ruido 1.5 V
Factor de Carga 50
Consumo de Potencia 0.1 mW
Como podemos ver los circuitos MOS tiene algunos aspectos mejores y otros peores en
comparación con los TTL o los ECL. El tiempo de retardo tan alto se debe a la alta
resistencia de entrada que tienen estos dispositivos y a la capacitancia de entrada
DISEÑO ELECTRONICO ANALOGO
139
razonablemente alta. Los MOS consumen muy pequeñas cantidades de potencia por lo
que son ampliamente utilizados para el LSI y el VLSI, donde se guardan grandes
cantidades de compuertas en un solo encapsulado sin ocasionar sobrecalentamiento.
Otro aspecto favorable es que los MOS son muy simples de fabricar, no requiere de otros
elementos como resistencias o diodos. Esta característica y su bajo consumo de potencia
son la causa de su gran auge en el campo digital.
La familia lógico MOS tiene una característica que no se había tomado en cuenta en las
familias anteriormente estudiadas, la sensibilidad estática. Esto es, que los dispositivos
MOS son sensibles a daño por electricidad estática. Al grado de que las mismas cargas
almacenadas en el cuerpo humano pueden dañarlos. La descarga electrostática provoca
grandes pérdidas de estos dispositivos y circuitos electrónicos por lo que se deben tomar
medidas especiales como: conectar todos los instrumentos a tierra física, conectarse a sí
mismo a tierra física, mantener los CI en una esponja conductora o en papel aluminio;
todo esto para evitar cargas electrostáticas que puedan dañar los dispositivos MOS.
DISEÑO ELECTRONICO ANALOGO
140
CIRCUITOS LOGICOS MOS COMPLEMENTARIOS
La familia CMOS utiliza MOSFET de canales P y N en el mismo circuito para obtener una
mayor velocidad de operación y un menor consumo de potencia. El problema de los
CMOS es la elevada complejidad del proceso de fabricación y su pequeña densidad de
integración..
Sin embargo, la lógica CMOS tiene una mayor densidad de integración y el proceso de
fabricación es más simple que la familia TTL.
En las figuras se representan los P-MOSFET y los N-MOSFET con unos bloques
marcados con P y N respectivamente. El inversor CMOS tiene dos MOSFET en serie de
modo que el dispositivo con canal P está conectado a +VDD y el de canal N esta
conectado a tierra. Cuando tenemos VENT = +VDD la compuerta de Q1 esta en 0V, esto
quiere decir que Q1 está apagado. La compuerta Q2 estará en +VDD, de esta manera Q2
esta encendido. En el caso donde VENT = 0 V, Q1 esta encendido y Q2 apagado
produciendo un voltaje de salida de aproximadamente + VDD.
La compuerta NAND está formada por la adición de un P-MOSFET en paralelo con un N-
MOSFET en serie al inversor básico. Puede observarse entonces, que la única vez que
una salida BAJA ocurrirá es cuando las entradas sean ambas ALTAS para encender los
MOSFET de canal N.
Para una compuerta NOR CMOS necesitamos agregar un P-MOSFET en serie y un N-
MOSFET en paralelo al inversor básico. Cuando tenemos un 0 lógico en cualquier entrada
enciende P-MOSFET y apaga N-MOSFET, y viceversa para una entrada ALTA.
10.4 TALLER
1. En un transistor NJFET con I
DSS
=10mA y V
P
= - 5 V se mide una intensidad de
drenaje I
D
= 1mA. Hallar cuánto vale la tensión V
GS
si se admite que trabaja en la
región de saturación. Hallar la tensión de alimentación E mínima para que el
transistor trabaje en saturación.
2. En el circuito de la figura, se pide:
DISEÑO ELECTRONICO ANALOGO
141
1.- La tensión V
GS
si se admite que el transistor está en saturación.
2.- Si V
IN
= 5V, calcular cuánto vale V
DS
.
Datos del transistor: I
DSS
= 5mA; V
P
= - 3V
3. Sea el circuito de la figura formado por un transistor NJFET y una resistencia. Se
pide:
1.- Indicar la región de funcionamiento del transistor.
2.- Calcular el punto de operación del transistor.
3.- Si se cambia la resistencia por otra de valor 1k, hallar el nuevo punto de operación del
transistor.
Datos del transistor: I
DSS
= 2mA; V
P
= - 3V
4. El transistor NJFET de la figura tiene una I
DSS
=12mA y V
P
=-4V. Determinar el valor
mínimo de E para que el transistor trabaje en la región de saturación.
DISEÑO ELECTRONICO ANALOGO
142
5. Calcular los valores de V
DS
y V
GS
del transistor de la figura si se admite que
I
D
=5mA.
6. Determinar el punto de operación del transistor FET de la figura suponiendo que
se encuentra en zona de saturación.
Datos: I
DSS
=5mA V
P
=-4V
7. Hallar el punto de operación del transistor de la figura. Datos: I
DSS
=15mA; V
P
=-10V
DISEÑO ELECTRONICO ANALOGO
143
8. En el circuito de la figura, calcular la resistencia de entrada R
IN
y la tensión de
salida V
OUT
. Si se conecta una resistencia de 4.7k a la salida del circuito, calcular
la tensión de salida. Datos del transistor: I
DSS
=8mA, V
P
=-10V
9. En el circuito de la figura se ha utilizado un transistor 2N5460. Calcular la ganancia
de tensión del circuito. Nota: Utilizar para ello los valores medios de los parámetros
del transistor.
10. Determinar la ganancia de tensión del circuito de la figura. Datos del transistor:
g
m
=3.8 mmhos
DISEÑO ELECTRONICO ANALOGO
144
11. El sencillo circuito de la figura es una fuente de corriente que alimenta una carga
R
L
.
a) Calcúlese el valor de la corriente I que circula por esa carga si el transistor se
encuentra en la región de saturación.
b) Hallar la resistencia R
L
máxima que se puede alimentar con la intensidad hallada
mediante el circuito anterior
Si el transistor JFET de la figura es un transistor comercial 2N5486, calcular entre qué
valores se puede esperar que varíe la intensidad I cuando el transistor trabaja en la región
de saturación. Datos: I
dss
=10mA; V
P
=-5V.
12. Con el transistor 2N5457 y otros componentes que crea necesarios, diseñe una
fuente de corriente constante de 0.2mA. ¿Cuál será la carga máxima que puede
alimentar la fuente de corriente?
13. En el circuito de la figura, calcular la tensión de salida si la tensión de entrada es
3V. Considerar que el transistor trabaja en la región de saturación. Datos
adicionales: R=100K; E=15V
DISEÑO ELECTRONICO ANALOGO
145
14. La tensión de entrada V
in
es una tensión que varía muy lentamente con el tiempo
de manera que, se puede resolver el circuito mediante un análisis en continua. Si
E=10V e I
D
=1mA, calcular la relación entre V
out
y V
in
. ¿Qué intensidad I
D
se debe
establecer en la fuente si se quiere que V
out
=V
in
? Datos del transistor: I
DSS
=3mA
V
P
=-5V
15. En el circuito de la figura, si ambos transistores son idénticos y se encuentran
térmicamente acoplados. Hallar la relación entre V
OUT
y V
IN
.
16. Determinar el valor de las salidas V
01
y V
02
cuando V
IN
valga cero y diez voltios.
Datos: V
TH
= 5 V. E
CC
= 20 V.
17. Para el diseño de una puerta lógica inversora, se realiza un esquema como el que
se representa a continuación.
DISEÑO ELECTRONICO ANALOGO
146
a) Calcular aproximadamente la potencia generada en la fuente de 8 Voltios en los
estados lógicos '1' y '0' de la entrada (10 V. y 0 V. Respectivamente).
b) ¿Qué misión tiene la resistencia de 15 K ?.
18. El siguiente circuito lógico está diseñado según la técnica CMOS (Complementary-
MOS).
Se denomina así por que emplea en el mismo circuito transistores NMOS y PMOS.
a) Explicar su funcionamiento y determinar qué tipo de puerta lógica es.
b) Comparar este circuito con el del anterior. ¿Qué ventajas presenta en cuanto a
consumo de potencia?.
19. Seleccionar el transistor más apropiado para el circuito lógico siguiente (0 V
IN
10V) (Calcular los parámetros comerciales del transistor):
DISEÑO ELECTRONICO ANALOGO
147
20. Determinar a qué tipo de puerta lógica corresponden los dispositivos de la figura
(Entradas: V
1
y V
2
; Salida: V
O
)
¿Qué consumo de potencia hay en los estados lógico '1' y '0' de ambos circuitos?
21. El circuito de la figura representa a un transistor actuando como un interruptor.
Cuando se polariza la puerta con una tensión de 15V, el transistor deja pasar una
corriente para alimentar la resistencia de carga. Al polarizar con 0V la puerta, el
transistor permanece en corte. Se pide:
a) Elegir un transistor MOS adecuado para realizar esta función.
b) Calcular aproximadamente la pérdida de potencia en el transistor si la señal de entrada
está comprendida entre 0 y 5V.
DISEÑO ELECTRONICO ANALOGO
148
22. Un transistor NMOS de deplección tiene un V
P
=-2V y K=2mA/V
2
. Calcular la V
DS
mínima para operar en la región de saturación si V
GS
=1V.
23. El transistor MOSFET de deplección de la figura tiene una K=4mA/V
2
y V
P
=-2V.
Calcular la tensión de la fuente
24. Calcular los parámetros que toman las resistencias R
D
y R
S
del circuito de la figura
para que el transistor opere con una I
D
=0.4mA y V
D
=1.Datos: V
TH
=2V; K=0.4mA/V
2
25. Se desea diseñar un circuito de alarma para un coche de manera que al salir del
coche con las luces encendidas, suene un zumbador. Para detectar la apertura de
la puerta se dispone de un sensor magnético entre la puerta y el coche que se
cierra con la puerta y da una señal de 0V. Al abrir la puerta, el sensor da una señal
de 5V. Por otro lado, se tiene un dispositivo que detecta el paso de corriente en el
circuito de iluminación. Se obtiene una señal de 5V con las luces encendidas y de
0V con las luces apagadas. El zumbador tiene que estar alimentado entre 1 y 16V
y recibir una corriente de 30mA. Diseñe el circuito con los transistores MOSFET
necesarios.
DISEÑO ELECTRONICO ANALOGO
149
DISEÑO ELECTRONICO ANALOGO
150
II. EL AMPLIFICADOR OPERACIONAL
Se llama así porque fue diseñado inicialmente para llevar a cabo operaciones matemáticas de suma e
integración en computadores analógicos. Estos son circuitos integrados de gran aceptación por su
diversidad, alto rendimiento y buen nivel de desempeño. La figura a muestra su representación
simbólica.
Figura a. Representación y características del amplificador operacional.
Las características de un amplificador operacional ideal son:
·
La ganancia en lazo abierto debe ser muy alta, idealmente infinito.
·
Su impedancia de entrada debe ser alta, idealmente infinita
·
Su impedancia de salida debe ser baja (idealmente cero).
De estas características se desprenden dos reglas de suma importancia dentro del análisis de circuitos
con amplificadores operacionales.
Regla 1. En un amplificador retroalimentado el voltaje de entrada diferencial es igual a cero.
Regla 2. La corriente de entrada del amplificador operacional ideal es igual a cero.
Con base en estas dos reglas podemos examinar los siguientes modos de configuración.
El concepto original del AO (amplificador operacional) procede del campo de los computadores
analógicos, en los que comenzaron a usarse técnicas operacionales en una época tan temprana como
en los años 40. El nombre de AO deriva del concepto de un amplificador dc (amplificador acoplado en
continua) con una entrada diferencial y ganancia extremadamente alta, cuyas características de
operación estaban determinadas por los elementos de realimentación utilizados. Cambiando los tipos y
DISEÑO ELECTRONICO ANALOGO
151
disposición de los elementos de realimentación, podían implementarse diferentes operaciones
analógicas; en gran medida, las características globales del circuito estaban determinadas solo por estos
elementos de realimentación. De esta forma, el mismo amplificador era capaz de realizar diversas
operaciones, y el desarrollo gradual de los AOs dio lugar al nacimiento de una nueva era en los
conceptos de diseño de circuitos.
Los primeros AOs usaban el componente básico de su tiempo: la válvula de vacío. El uso generalizado
de los AOs no comenzó realmente hasta los años 60, cuando empezaron a aplicarse las técnicas de
estado sólido al diseño de circuitos AOs, fabricándose módulos que realizaban la circuitería interna del
AO mediante diseño discreto de estado sólido. Entonces, a mediados de los 60, se introdujeron los
primeros AOs de circuito integrado. En unos pocos años los AOs integrados se convirtieron en una
herramienta estándar de diseño, abarcando aplicaciones mucho más allá del ámbito original de los
computadores analógicos. Con la posibilidad de producción en masa que las técnicas de fabricación de
circuitos integrados proporcionan, los AOs integrados estuvieron disponibles en grandes cantidades, lo
que, a su vez contribuyó a rebajar su costo. El amplificador, que era un sistema formado antiguamente
por muchos componentes discretos, ha evolucionado para convertirse en un componente discreto él
mismo, una realidad que ha cambiado por completo el panorama del diseño de circuitos lineales. Con
componentes de ganancia altamente sofisticados disponibles al precio de los componentes pasivos, el
diseño mediante componentes activos discretos se ha convertido en una pérdida de tiempo y de dinero
para la mayoría de las aplicaciones dc y de baja frecuencia. Claramente, el AO integrado ha redefinido
las "reglas básicas" de los circuitos electrónicos acercando el diseño de circuitos al de sistemas. Lo que
ahora se debe hacer es conocer adecuadamente los AOs, cómo funcionan, cuáles son sus principios
básicos y estudiar sus aplicaciones.
Los AOs se diseñan para utilizarse con componentes externos y de esta manera proporcionar las
funciones de trasferencia requeridas, mejorar las capacidades y la versatilidad, y cambiar las
características de operación. Estas características incluyen respuesta en frecuencia, desplazamiento de
fase de la señal, ganancia y función de transferencia. Los componentes se colocan en uno o más
circuitos retroalimentados y en los terminales de entrada.
1. CONCEPTOS BÁSICOS SOBRE LOS AMPLIFICADORES
Uno de los bloques funcionales más importantes de los sistemas electrónicos lineales es
el amplificador. A continuación se estudiarán algunas características externas de los
amplificadores. Un amplificador puede ser considerado como una red de dos puertos, uno
de entrada y uno de salida. Por lo cual, como todo cuadripolo, tiene cuatro parámetros a
ser considerados: tensión y corriente a la entrada y tensión y corriente a la salida. La
tensión (o corriente) de salida está relacionada con la tensión (o corriente) de entrada
mediante un parámetro de ganancia. Si la señal de salida es directamente proporcional a
la señal de entrada, de tal manera que la salida sea una réplica de la señal de entrada, se
dice que el amplificador es lineal, es decir,
(1)
Donde x
o
y x
i
son las señales de salida y entrada respectivamente, y A
k
es la ganancia del
amplificador. Se definen cuatro tipos de amplificadores básicos, según las variables
dependientes e independientes que se tengan:
DISEÑO ELECTRONICO ANALOGO
152
· Amplificador de tensión
(2)
· Amplificador de corriente
(3)
· Amplificador de transimpedancia
(4)
· Amplificador de transconductancia
(5)
También se definen otros dos parámetros importantes en el análisis de los amplificadores
lineales:
· Impedancia de entrada
(6)
· Impedancia de salida
(7)
La impedancia de entrada es la medida de la corriente extraída por el amplificador.
Mientras que la impedancia de salida es el valor de la impedancia dinámica interna vista
desde las terminales de salida de un amplificador; es decir, es la impedancia equivalente
de Thévenin.
1.1. Amplificador como parte de una red
Las señales de salida de los transductores pueden estar dadas en V ó A y son en general
débiles (del orden de los µV o pA), además poseen una cantidad de energía muy baja
(pW o nW ). De otra parte pueden estar en un lugar remoto, por lo cual la transmisión y
adquisición de las señales generadas debe hacerse a través de un medio adecuado, v.
gr., transformando una señal de tensión a corriente para formar un lazo de corriente y
evitar las pérdidas ohmicas en la línea de transmisión. Para esto se deben analizar las
topologías básicas de los amplificadores planteadas aquí. Se analizarán los diferentes
amplificadores conectados a una cierta fuente de señal y a una carga determinada.
DISEÑO ELECTRONICO ANALOGO
153
Amplificador de tensión
En este caso se tiene (ver Fig. 1(a)):
Figura 1: (a) Amplificador de tensión. (b) Fuente de tensión controlada
por tensión.
de donde
Entonces, la ganancia de tensión está dada por
(8)
Para máxima ganancia de tensión se debe cumplir
(9)
DISEÑO ELECTRONICO ANALOGO
154
Esto significa que un buen amplificador de tensión debe tener alta impedancia de
entrada y muy baja impedancia de salida. Este es el caso de la mayoría de AOs
convencionales.
Por lo tanto,
(10)
y
(11)
El sistema se comporta como una fuente de tensión controlada por tensión (VCVS) o
convertidor tensión a tensión, como se muestra en la Fig. 1(b).
Amplificador de corriente
En este caso se tiene (ver Fig. 2(a)):
Figura 2: (a) Amplificador de corriente. (b) Fuente de corriente
controlada por corriente.
de donde
DISEÑO ELECTRONICO ANALOGO
155
Entonces, la ganancia de corriente está dada por
(12)
Para máxima ganancia de corriente se debe cumplir
(13)
Esto significa que un buen amplificador de corriente debe tener muy baja impedancia de
entrada y muy alta impedancia de salida. Este es el caso de los llamados amplificadores
Norton, tal como el LM3900 y el LM359.
Por lo tanto,
(14)
y
(15)
El sistema se comporta como una fuente de corriente controlada por corriente (CCCS) o
convertidor corriente a corriente, como se muestra en la Fig. 2(b).
Amplificador de transconductancia
En este caso se tiene (ver Fig. 3(a)):
DISEÑO ELECTRONICO ANALOGO
156
Figura 3: (a) Amplificador de transconductancia. (b) Fuente de corriente
controlada por tensión.
de donde
Entonces, la ganancia de transconductancia está dada por
(16)
Para máxima ganancia de transconductancia se debe cumplir
(17)
Esto significa que un buen amplificador de transconductancia debe tener alta impedancia
de entrada y alta impedancia de salida. En el comercio se encuentran amplificadores de
transconductancia en estructura monolítica tal como el LM3080 y el LM13700.
Por lo tanto,
(3.2.18)
y
DISEÑO ELECTRONICO ANALOGO
157
(19)
El sistema se comporta como una fuente de corriente controlada por tensión (VCCS) o
convertidor tensión a corriente, como se muestra en la Fig. 3(b).
Amplificador de transimpedancia
En este caso se tiene (ver Fig. 4(a)):
Figura 4: (a) Amplificador de transimpedancia. (b) Fuente de tensión
controlada por corriente.
de donde
Entonces, la ganancia de transimpedancia está dada por
(20)
Para máxima ganancia de transimpedancia se debe cumplir
DISEÑO ELECTRONICO ANALOGO
158
(21)
Esto significa que un buen amplificador de transimpedancia debe tener muy baja
impedancia, tanto de entrada como de salida.
Por lo tanto,
(22)
y
(23)
El sistema se comporta como una fuente de tensión controlada por corriente (CCVS) o
convertidor corriente a tensión, como se muestra en la Fig. 4(b).
1.3.
Características del Amplificador Operacional:
Para evaluar adecuadamente el potencial de un AO para aplicación específica se requiere
comprender sus características.
Figura 5: Circuito equivalente de un amplificador operacional.
La Fig. 5 representa el circuito equivalente de un AO y sus parámetros. Los parámetros
ilustrados en la Fig. 5 se definen como sigue:
·
Corrientes de polarización de entrada (I
B1
e I
B2
) --la corriente que fluye en ambas
entradas del AO.
·
Tensión de entrada diferencial (V
S
) --la diferencia de potencial entre la entrada no
inversora (+) y la entrada inversora (-).
·
Tensión de entrada offset (V
IO
) --una tensión de entrada generada internamente e
identificada como la tensión que se debe aplicar a los terminales de entrada para
producir una salida de 0 V.
·
Resistencia de entrada (R
i
) --la resistencia de cada entrada cuando la otra está
aterrizada.
·
Tensión de salida (V
O
) --tensión normal de salida medida con respecto a tierra.
DISEÑO ELECTRONICO ANALOGO
159
·
Resistencia de salida (R
O
) --resistencia a la salida del AO.
·
Ganancia de tensión diferencial (A
VD
) o ganancia de tensión en lazo abierto (A
OL
)
--la relación entre las tensiones de salida y de entrada diferencial del AO sin
realimentación externa.
·
Ancho de banda (BW) --la banda de frecuencias sobre la cual la ganancia (V
O
/V
S
)
del AO permanece en los límites deseados (por encima de 3 dB).
El símbolo del generador en la Fig. 3.5 representa la tensión de salida resultante del
producto de la ganancia y la tensión de entrada diferencial (A
VD
· V
S
).
Un AO (ver Fig. 6) proporciona una tensión de salida lineal, el cual es proporcional a la
diferencia en la tensión entre los dos terminales de entrada. La tensión de salida será de
la misma polaridad de la resultante entre la diferencia de las tensiones en los terminales
no inversor e inversor. Cuando la entrada no inversora es más positiva que la entrada
inversora, la tensión de salida tendrá una amplitud positiva. Cuando la entrada no
inversora es más negativa que la entrada inversora, la tensión de salida tendrá una
amplitud negativa.
Figura 6: AO Ideal.
Un AO sin realimentación externa desde la salida hasta la entrada se describe como en
modo de lazo abierto. Algunas características de un AO ideal funcionando en el modo de
lazo abierto son:
Ganancia diferencial
Resistencia de entrada
Ganancia en modo
común
= 0
Resistencia de salida
= 0
Tensión de offset
= 0
Ancho de banda
A partir de estas características del AO, se pueden deducir otras dos importantes
propiedades adicionales. Puesto que la ganancia en tensión es infinita, cualquier señal de
salida que se desarrolle será el resultado de una señal de entrada infinitesimalmente
pequeña. Luego, en resumen:
·
La tensión de entrada diferencial es nula.
·
Si la resistencia de entrada es infinita, no existe flujo de corriente en ninguno de
los terminales de entrada.
DISEÑO ELECTRONICO ANALOGO
160
Estas dos propiedades pueden considerarse como axiomas y se emplearán
repetidamente en el análisis y diseño del circuito del AO. Una vez entendidas estas
propiedades, se puede, lógicamente, deducir el funcionamiento de casi todos los circuitos
con amplificadores operacionales.
2.3.2. Características principales de operación
Las características detalladas y específicas de funcionamiento de un AO particular se
pueden encontrar en las hojas de datos apropiadas. Una hoja de datos de un AO
proporcionará normalmente muchas características eléctricas no genéricas. Las
características eléctricas proporcionadas son para una tensión de alimentación y una
temperatura ambiente específicos y usualmente tendrá unos valores mínimo, típico y
máximo. Las principales características de un AO y su significado son como sigue:
·
Corriente de offset de entrada (I
IO
) --la diferencia entre las dos corrientes de
polarización de entrada cuando la tensión de salida es cero.
·
Rango de tensión de entrada en modo común (V
ICR
) --el rango de la tensión de
entrada en modo común (es decir, el voltaje común a ambas entradas).
·
Corriente de salida en corto circuito (I
OS
) --la máxima corriente de salida que el AO
puede entregar en un corto circuito.
·
Fluctuación de la tensión de salida (V
OPP
) --el máximo voltaje de salida pico a pico
que el AO puede entregar sin que ocurra saturación o corte. Esta característica es
dependiente de la resistencia de carga.
·
Ganancia de tensión diferencial de gran señal (A
VD
) --la relación entre la
fluctuación del voltaje de salida y la del voltaje de entrada cuando la salida se lleva
a un voltaje de gran señal específico (típicamente ±10 voltios).
·
Velocidad de cambio (SR) --la tasa de tiempo del cambio del voltaje de salida en
lazo cerrado con el circuito AO llevado a una ganancia de voltaje unitaria (1).
·
Corriente de alimentación (I
CC
) --la corriente total que el AO drenará de las fuentes
de polarización cuando está sin carga.
·
Relación de rechazo en modo común (CMRR) --medida de la habilidad que posee
un AO para rechazar las señales que se presenten simultáneamente en ambas
entradas. La relación del voltaje de entrada en modo común al voltaje generado de
salida y se expresa generalmente en decibeles (dB).
En los parágrafos precedentes se ha discutido las características básicas del AO. Los
parágrafos siguientes proporcionarán una información más detallada.
DISEÑO ELECTRONICO ANALOGO
161
Ganancia y respuesta en frecuencia
A diferencia del AO ideal, un amplificador operacional típico tiene una ganancia diferencial
y un ancho de banda finitos. Debido a que muchas de las características del AO ideal son
irrealizables, las características de un AO típico difieren significativamente de las del AO
ideal.
La ganancia en lazo abierto de un AO típico se muestra en la Fig. 7 (LM6171). A bajas
frecuencias, la ganancia en lazo abierto es constante. Sin embargo, a altas frecuencias
(por encima de 100 MHz) la ganancia se reduce a una tasa de -6dB/octava. La frecuencia
a la cual la ganancia alcanza al valor unitario se denomina ancho de banda unitario y se
denota por B1.
Cuando una porción de la señal de salida se realimenta a la entrada del AO, la relación
entre el voltaje de salida y el de entrada se denomina ganancia en lazo cerrado. La
ganancia en lazo cerrado es siempre menor que la ganancia en lazo abierto. Debido a
que el error en la ganancia es proporcional a la relación entre la ganancia en lazo cerrado
y la ganancia en lazo abierto, es deseable un valor muy alto de la ganancia en lazo
abierto.
Figura 7: Ancho de banda del AO LM6171.
Producto ganancia--ancho de banda
Cuando se selecciona un AO para una aplicación particular, uno de los factores primarios
que se debe considerar es el producto ganancia--ancho de banda. El producto de la
ganancia en lazo cerrado y la respuesta en frecuencia, permanece constante en cualquier
punto de la porción lineal de la curva de ganancia en lazo abierto (ver Fig. 8).
El ancho de banda es la frecuencia a la cual la curva de ganancia en lazo cerrado
intercepta la curva de ganancia en lazo abierto como se muestra en la Fig. 8. Se puede
obtener el ancho de banda para cualquier ganancia en lazo cerrado, dibujando una línea
horizontal desde la ganancia deseada a la intersección con la curva de ganancia de lazo
DISEÑO ELECTRONICO ANALOGO
162
abierto. En un diseño típico, se deberá utilizar un factor de 0.1 o menos de la ganancia en
lazo abierto a una frecuencia dada. Esto asegura que el AO funcionará adecuadamente
con un mínimo de distorsión. Cuando se incrementa la ganancia de voltaje de un circuito
con AO, el ancho de banda se decrementa.
Figura 8: Producto ancho de banda por ganancia vs carga
capacitiva en un AO
LM6171.
Influencia de la resistencia de entrada
La influencia de la resistencia de entrada se puede encontrar aplicando las leyes de
Kirchhoff. De la Fig. 9 se obtiene:
(2.1)
(2.2)
Si la ganancia en lazo abierto es infinita, la tensión de entrada diferencial
será cero y el valor de la resistencia de entrada no tendrá influencia (si no
es cero).
Puesto que V
DI
= V
O
/A
VD
, se tiene:
(2.3)
Por lo tanto,
(2.4)
o
DISEÑO ELECTRONICO ANALOGO
163
(2.5)
Figura 9: Influencia de la impedancia de entrada.
Las ecuaciones anteriores indican que la resistencia de entrada tendrá poco o ningún
efecto (a menos que sea pequeña comparada con R
1
) sobre la relación de la tensión de
salida a la tensión de entrada. Por lo tanto, la ganancia en lazo cerrado para aplicaciones
típicas, es independiente de la resistencia de entrada.
Influencia de la tensión offset de entrada
La tensión offset de entrada (V
IO
) es una tensión generada internamente y puede ser
considerada como una fuente de voltaje insertada entre las dos entradas (ver Fig. 10).
Además, es una tensión diferencial de entrada resultante del desajuste del AO en las
etapas de entrada.
Figura 10: Influencia de la tensión offset de entrada.
El efecto sobre la corriente I
1
e I
2
puede ser determinada por las siguientes ecuaciones:
(2.6)
Si la tensión de entrada (V
I
) es cero, la ecuación es como sigue:
DISEÑO ELECTRONICO ANALOGO
164
(2.7)
La tensión de salida es la tensión offset de salida (V
OO
). La siguiente
ecuación
se usa para determinar V
OO
:
(2.8)
EL valor de la tensión offset de entrada se puede encontrar dividiendo la tensión offset de
salida entre la ganancia de lazo cerrado.
Compensación del offset de entrada
Un AO ideal tiene voltaje offset de entrada cero y no tiene pérdidas de corriente. Sin
embargo, debido al desajuste de los transistores y a las resistencias de entrada del
circuito monolítico, el AO típico tiene un bajo, pero definido, voltaje de offset. La mayoría
de los AOs vienen provistos de conectores para un potenciómetro externo, de modo que
el offset de entrada pueda ser ajustado a cero. El método exacto usado y la resistencia
total del potenciómetro de ajuste nulo es dependiente del tipo de circuito que conforma al
AO. Un AO de propósito general, compensado internamente (v.gr.: un µA741), puede
requerir un potenciómetro de 10k . Un BiFET o AO compensado externamente puede
requerir un potenciómentro de 100k . El voltaje offset de entrada recomendado para
circuitos de ajuste nulo, se muestra usualmente en la hoja de datos.
Figura 11: (a) Pines de anulación de offset conectados a los emisores.
(b) Pines de anulación de offset conectados a los colectores.
Los métodos de anulación de tensión offset de entrada se muestran en la Fig. 11(a) y Fig.
11(b). Se utiliza un circuito similar al que se muestra en la Fig.11, cuando
los pines de anulación de offset (N
1
y N
2
) se conectan a los emisores del generador de
corriente constante. Cuando los pines de anulación de offset se conectan a los colectores
del generador de corriente constante, se usa un circuito similar al que se muestra en la
Fig. 11(b).
DISEÑO ELECTRONICO ANALOGO
165
Los valores reales del resistor dependen del tipo del AO usado. Se debe consultar la hoja
de datos apropiada para complementar los procedimientos de nulidad del offset de
entrada.
Coeficiente de temperatura de la tensión offset de entrada
El coeficiente de temperatura de la tensión offset de entrada (tensión offset de deriva) se
específica en voltios por grados Celsius. La cantidad acumulada que ocurre con los
cambios de temperatura se relaciona directamente a cuan cercanamente ajustadas
estaban las características de entrada cuando se fabricó el dispositivo. Los dispositivos de
entrada BiFET (tales como la familia TL080) típicamente tienen de 10 a 12 µV/
C. La
familia de AOs LinCMOS
®
tienen de 0.7 a 5 µV/
C dependiendo del modo de polarización
seleccionado.
Figura 12: Influencia de la corriente de polarización de entrada.
Influencia de la corriente de polarización de entrada
Tanto la corriente de polarización (I
3
) como las corrientes de operación normal (I
1
e I
2
)
fluyen a través de los resistores R
1
y R
3
(ver la Fig. 3.12). La corriente I3 genera una
tensión diferencial de entrada igual al producto R
1
||R
2
× I
3
. La tensión de entrada
diferencial (la cual es similar a la tensión offset de entrada) aparece también como una
componente de la salida la cual es amplificada por la ganancia del sistema. Más tarde se
discutirán algunos métodos para corregir los efectos de la corriente de polarización de
entrada.
Influencia de la resistencia de salida
La influencia de la resistencia de salida se ilustra en la Fig13. La corriente de salida se
puede expresar con la siguiente ecuación:
(2.9)
Si V
OI
es la tensión de salida del amplificador ideal equivalente y V
OR
es
la tensión de salida del dispositivo real, entonces V
OR
se puede
determinar a partir de la siguiente relación:
DISEÑO ELECTRONICO ANALOGO
166
(2.10)
Combinando (3.3.9) y (3.3.10):
(2.11)
Figura 13: Influencia de la impedancia de salida.
Para el caso ideal, V
OI
= A
vd
V
DI
; por lo tanto:
(2.12)
Se observa que si la resistencia de salida R
O
es pequeña, el valor de la tensión de salida
del amplificador real se acercará al ideal.
Rango de entrada en modo común
Se puede definir rango de entrada en modo común como el rango máximo de la tensión
de entrada que se puede aplicar simultáneamente a ambas entradas sin causar corte,
deformación o saturación en las etapas del amplificador. La etapa de entrada debe ser
capaz de operar dentro de las especificaciones para todo el rango dinámico de elongación
en la salida. Si no lo hace, el amplificador puede ir a saturación cuando se exceden los
límites en la entrada. El rango de tensión en modo común especificado de la etapa de
entrada, debe exceder a la máxima elongación de la tensión pico a pico en los terminales
de entrada o la etapa de entrada se puede saturar con los picos. Cuando ocurre la
saturación, la etapa de entrada inversora no invierte más. La realimentación negativa se
transforma en positiva y la etapa permanece en saturación.
Relación de rechazo en modo común (CMRR)
DISEÑO ELECTRONICO ANALOGO
167
La relación de rechazo en modo común (CMRR) se puede definir como la razón de la
ganancia de señal diferencial a ganancia de señal en modo común y se expresa en
decibeles (dB)
(2.13)
Un AO ideal responde solamente a las señales de entrada en modo diferencial e ignora
las señales en modo común en ambas entradas. En un circuito típico, sin embargo, los
amplificadores tienen un pequeño, pero definido error en modo común. El rechazo en
modo común es importante para los amplificadores no inversores o diferenciales debido a
que estas configuraciones ven una tensión en modo común. Dependiendo del tipo de
dispositivo, las relaciones de rechazo pueden estar en un rango entre 90 dB y 120 dB.
Generalmente, los AOs bipolares tienen relaciones de rechazo más altas que los
amplificadores con entrada FET.
Influencia de la deriva de corriente y tensión
La tensión de offset de entrada, la corriente de polarización de entrada y las corrientes de
offset diferenciales pueden derivar con la temperatura. Aunque es relativamente fácil
compensar cada uno de estos efectos en si mismos, es dificil corregir la deriva producida
por las variaciones de temperatura. Sin embargo, hay algún control limitado ofrecido en
los diseños, para las características de deriva presentadas. Cuando se esperan
tendencias de deriva en un problema de diseño, se deberá considerar el tipo de
dispositivo, la construcción y la aplicación correspondiente.
Velocidad de respuesta (slew rate)
La velocidad de respuesta se puede definir como la tasa máxima de cambio de la tensión
de salida en la unidad de tiempo, para una tensión escalón aplicada a la entrada (ver Fig.
14).
Figura 14: Efecto de la velocidad de respuesta.
DISEÑO ELECTRONICO ANALOGO
168
La velocidad de respuesta normalmente se mide con el amplificador conectado en
configuración de ganancia unitaria. Tanto la velocidad de respuesta como el producto
ancho de banda por la ganancia son medidas de la velocidad del AO. En la Fig. 14 se
puede ver el valor de la pendiente de la recta generada en la salida, cuando el
amplificador se excita con un pulso. Por lo tanto, la medida de la velocidad de respuesta
estará dada por
(2.14)
Figura 15: Velocidad de respuesta en un LM6171.
El SR en los AOs típicos varía entre 10
5
[V /s]
S
R
10
9
[V /s]. A continuación se dan los
valores del S
R
de algunos AOs: Para el OP--07 alimentado con ±15V y con R
L
2k , el
valor típico es de 0.3V/µs, para el LF353 alimentado con ±15V y con R
L
1k , el valor
típico es de 13V/µs, para el LM6171 con A
v
= +2, v
i
= 13V
PP
, el valor típico es de
3600V/µs. Para el caso del LM6171 el S
R
se determina por la corriente disponible para
cargar y descargar un capacitor interno en un nodo de alta impedancia.
La corriente se define como la relación entre la tensión de entrada diferencial y la
impedancia (resistencia) de entrada equivalente. Por lo tanto, el S
R
es proporcional al
nivel de la tensión de entrada, por lo que se obtienen valores más altos de S
R
en
configuraciones
de
ganancia
más
bajas
(ver
Fig.
3.15)
[47].
El S
R
ocasiona que la forma de onda de salida de un AO real pueda llegar a ser muy
diferente a la de un AO ideal.
DISEÑO ELECTRONICO ANALOGO
169
Figura 16: Circuito de prueba para observar la velocidad de
respuesta.
Por ejemplo, considérese el amplificador de tensión de la Fig. 16. Puesto que se trata de
un OP--07, presenta un S
R
= 0.3V/µs. Se ha aplicado una señal de entrada senoidal de
200kHz dada por:
(2.15)
Ancho de banda de potencia
El ancho de banda de potencia de un AO es el margen de frecuencia para el cual el AO
puede producir una señal de salida sinusoidal sin distorsiones, con una amplitud pico igual
al máximo garantizado de la tensión de salida. Se calculará a continuación una expresión
para calcular el ancho de banda de potencia en función del SR y de la amplitud del pico
de la señal de salida. La señal de salida está dada por
Tomando la derivada respecto al tiempo se obtiene
La máxima velocidad de cambio es
V
op
= 2
V
op
. Igualando esta
expresión al límite de la velocidad de subida se obtiene
Despejando la frecuencia se llega a
(2.16)
DISEÑO ELECTRONICO ANALOGO
170
Donde se ha expresado el ancho de banda de potencia total como
bp
. Una forma de onda
de salida sinusoidal de amplitud total y sin distorsión, solo es posible para frecuencias
inferiores a
bp
.
Ejercicio 1 Calcular el ancho de banda de potencia de un amplificador operacional OP--
07 si el S
R
= 0.3V/µs, y la amplitud de la salida máxima garantizada es 14 V.
Solución:
Se sustituye la información proporcionada en la ecuación (2.16) y se obtiene
Por lo tanto, se puede obtener del OP--07 una salida sinusoidal sin distorsión de 14 V de
pico para frecuencias menores de 3.4 kHz.
Ruido
Aunque no se establece como una de las características principales del AO ideal, es
deseable una operación libre de ruido. Los AOs típicos degradan la señal de entrada
agregando componentes de ruido. Los componentes de ruido usualmente son aleatorios y
determinan el límite inferior de la capacidad de manejo de señal. El ruido generalmente se
especifica en la hoja de datos como ruido de entrada equivalente y, como los otros
factores de entrada, se incrementa con la ganancia de la etapa. Hay varias fuentes
potenciales de ruido en un AO. Las más comunes son el ruido térmico, causado por las
resistencias de las dos fuentes, el ruido de corriente interno y los generadores de tensión
de ruido. En aplicaciones normales de audio, la tensión de ruido será la fuente dominante
de ruido en el amplificador. Cuando se incrementa la resistencia de la fuente, el efecto del
ruido corriente (ver Fig. 17) se incrementa hasta que la corriente de ruido y el ruido del
resistor de compensación de polarización en conjunto son los componentes dominantes
del ruido de entrada del amplificador [50]. En las especificaciones estos dos parámetros
se detallan separadamente (ver Figs. 17 y 18). La tensión de ruido se especifica con una
resistencia de la fuente baja (ver Fig. 18).
DISEÑO ELECTRONICO ANALOGO
171
Figura 17: Respuesta de corriente de ruido en un amplificador.
Figura 18: Respuesta de tensión de ruido en un amplificador.
Tanto vn como in se dan en términos de densidad de energía. Éstos se miden con un
filtro de ancho de banda estrecho (1Hz de ancho) en una serie de puntos a lo ancho del
espectro útil del amplificador. Los datos usualmente se dan en términos de la tensión de
ruido vs la frecuencia. Datos prácticos o curvas sobre hojas de datos normalmente se dan
como sigue:
Donde en es la densidad de ruido en la tensión de entrada y BW es el ancho de banda en
[Hz]. La Fig.19 corresponde al fragmento de una hoja de datos del AO LM6271
(amplificador con realimentación e corriente) donde se indican algunos de los parámetros
mencionados en este apartado, en particular el ruido de tensión y de corriente en el
dispositivo.
DISEÑO ELECTRONICO ANALOGO
172
Figura 19: Hoja de datos de un amplificador típico
.
En general, los AOs de baja corriente de entrada (FET) o los AOs de baja corriente de
polarización tendrán corriente de ruido más baja y tienden a ser más silenciosos a
impedancias de la fuente por encima de 10k . Por debajo de 10k , la ventaja es ahora
de los AOs bipolares los cuales tienen más bajo ruido en la tensión de entrada. Cuando la
impedancia de la fuente está por debajo de 10k , la resistencia real de la fuente está
compuesta principalmente por la resistencia del generador. La configuración no inversora
del AO tiene menos ganancia de ruido que la configuración inversora para ganancias
bajas de señal y por tanto tendrá alta relación señal a ruido. A altas ganancias; sin
embargo, esta ventaja disminuye [50].
Ancho de banda de ganancia unitaria y margen de fase
Hay cinco parámetros relacionados con las características de frecuencia de los AOs que
probablemente se encuentran en las hojas de datos de los AOs. Éstos son el ancho de
banda a ganancia unitaria (B
1
), producto ancho de banda por ganancia (GBW), margen de
fase a ganancia unitaria (
m
), margen de ganancia (A
m
) y Máximo ancho de banda de
oscilación de salida (B
OM
).
El ancho de banda a ganancia unitaria (B
1
) y el producto ancho de banda por ganancia
(GBW) son muy similares. B1 especifica la frecuencia a la cual A
VD
del AO es 1:
(2.17)
GBW especifica el producto ancho de banda por ganancia del AO en configuración de
lazo abierto y la salida con carga:
DISEÑO ELECTRONICO ANALOGO
173
Figura 20: Circuito simplificado de un amplificador operacional
donde se indican las etapas principales.
(2.18)
GBW es constante para amplificadores con realimentación de tensión. No tiene mucha
significación para amplificadores con realimentación de corriente debido a que no hay una
relación lineal entre la ganancia y el ancho de banda [39].
·
El margen de fase a ganancia unitaria (
m
) es la diferencia entre la cantidad de
desplazamiento de fase que experimenta una señal a través del AO con ganancia
unitaria y 180
:
(2.19)
·
El margen de ganancia es la diferencia entre la ganancia unitaria y la ganancia a
180
de desplazamiento de fase:
Margen de Ganancia = 1- Ganancia@180
de desplazamiento de fase
·
Máximo ancho de banda de elongación de salida (BOM ). Especifica el ancho de
banda sobre el cual la salida está por encima de un valor específico:
BOM =
MAX
, mientras v
O
v
MIN
·
El factor limitante para el B
OM
es el S
R
. A medida que aumenta la frecuencia la
salida es cada vez más limitado el S
R
y puede no responder suficientemente
rápido a la elongación de la tensión de salida.
DISEÑO ELECTRONICO ANALOGO
174
Con el fin de hacer que el AO sea más estable, se fabrica a propósito un capacitor C
C
, en
la segunda etapa dentro del chip (Fig.20). Este tipo de compensación en frecuencia se
denomina compensación del polo dominante. La idea es hacer que la ganancia en lazo
cerrado del AO sea la unidad antes que la fase de la salida se desplace 180
.
Figura 21: Amplificación de tensión y desplazamiento de fase vs
frecuencia.(según [39]).
La Fig. 22 muestra una gráfica típica de ganancia vs frecuencia para un AO compensado
internamente, como se presenta en la hoja de datos de un fabricante típico.
Como ya se observó, A
VD
se reduce con la frecuencia. A
VD
(y también B
1
o GBW) es un
aspecto del diseño del dispositivo cuando se requiere una ganancia precisa dentro de una
banda de frecuencia.
El margen de fase (
m
) y el margen de ganancia (A
m
) son modos diferentes de especificar
la estabilidad del circuito. Puesto que el valor de salida de los AOs con salidas rail-to-rail
1
(RR) tiene más alta impedancia de salida, se puede ver un desplazamiento de fase
significativo cuando se impulsan cargas capacitivas. Este desplazamiento de fase extra
reduce el margen de fase, y por esta razón la mayoría de los AOs CMOS con salida RR
tienen habilidad limitada para impulsar cargas capacitivas.
DISEÑO ELECTRONICO ANALOGO
175
Figura 22: Circuito para la medición del margen de fase.
El margen de fase es de 180
menos el desplazamiento de fase a la frecuencia donde la
magnitud de la ganancia de tensión en lazo abierto es igual a la unidad. El margen de
fase se mide en grados y debe ser positivo para estabilidad incondicional. La Fig. 22
ilustra un circuito típico usado para medir el margen de fase, cuya respuesta temporal
correspondiente se observa en la Fig. 3.24. Si la diferencia de fase entre la forma de onda
de la entrada y la salida es de 180
, 180
- 120
= 60
será el margen de fase. El margen
de fase puede o no ser dado en la hoja de datos del amplificador. El margen de fase
normalmente estará entre 50
y 70
en los AOs disponibles comercialmente. Cuando el
margen de fase decrece a 45
, el amplificador tiende a ser inestable y puede oscilar.
Máxima elongación de la tensión de salida
La máxima elongación de la tensión de salida, V
OM±
, se define como el máximo voltaje
pico positivo o negativo que se puede obtener a la salida sin que la forma de onda se
recorte, cuando la salida dc es cero. La V
OM±
, está limitada por la impedancia de salida del
amplificador, la tensión de saturación de los transistores de salida y las tensiones de las
fuentes de polarización. Esto se muestra pictóricamente en la Fig. 23.
Figura 23: Elongación de la tensión de salida.
Esta estructura de seguidor de emisor no puede impulsar la tensión de salida al valor de
polarización (riel por la forma). Los SRR usan una etapa de salida en emisor común
(bipolares) o en fuente común (CMOS). Con estas estructuras, la elongación de la tensión
DISEÑO ELECTRONICO ANALOGO
176
de salida está limitada solamente por la tensión de saturación (bipolares) o la resistencia
de encendido (CMOS) de los transistores de salida y por la carga que se desea impulsar.
Las resistencias de carga dadas en las hojas de datos usualmente son de 2 k o de 10
k . Con resistencias de carga inferiores a 2 k , la salida se decrementa debido a límites
en la corriente. Normalmente, esto no dañará al AO, hasta tanto los límites de corriente
especificados en la hoja de datos no sean excedidos. Sin embargo, la ganancia en lazo
cerrado se reducirá debido a la carga excesiva.
__________________________________________________
1
La designación rail-to-rail para indicar que la tensión de elongación permitida es igual a la diferencia de potencial entre las
fuentes de polarización, es marca registrada por Motorola Co. Con esto se especifica también un tipo de AO con
polarizaciones muy bajas y alta elongación en la entrada y/o en la salida.
2. MODO INVERSOR
Figura c. Amplificador en modo inversor
De donde la ganancia del amplificador es:
DISEÑO ELECTRONICO ANALOGO
177
G indica entonces la ganancia total del circuito y el signo negativo indica una inversión de
fase.
3. MODO NO INVERSOR
Figura d. Amplificador en modo no inversor
Aplicando al circuito las reglas 1 y 2, Vda = 0, Iamp = 0, se obtienen las siguientes
ecuaciones.
Para la malla uno
Para la malla dos
Dado que:
Entonces la corriente I1 está dada por:
DISEÑO ELECTRONICO ANALOGO
178
Se tiene la ganancia G
DISEÑO ELECTRONICO ANALOGO
179
4. SEGUIDOR DE TENSION
Figura e. Configuración de un amplificador operacional como seguidor de tensión.
Partiendo de la configuración no inversora del AO de la figura d. La ganancia G del
circuito está dada por:
Dado que
y
,
obtenemos que la ganancia G = 1 y por lo tanto
DISEÑO ELECTRONICO ANALOGO
180
El circuito presenta una impedancia de entrada muy alta y una impedancia de salida muy
baja por lo tanto esta configuración es muy útil en la unión de etapas con requerimientos
de acople de impedancias.
5. AMPLIFICADOR COMO SUMADOR
Es un amplificador inversor con múltiples resistencias de entrada, la sumatoria de
corrientes en el nodo son amplificadas a través del lazo de realimentación.
Figura f. Amplificador operacional en modo sumador
La ecuación anterior determina que la ganancia del circuito sumador está dada en función
de los voltajes de entrada Va , Vb ... Vc y por el factor de escala R2/Rn.
Para obtener una mayor estabilización con respecto a la tensión offset en el amplificador
sumador, suele colocarse la resistencia Re = R2||Ra||Rb||Rc
DISEÑO ELECTRONICO ANALOGO
181
6. AMPLIFICADOR COMO INTEGRADOR
Figura g. Amplificador operacional en modo integrador
Con la utilización de un condensador en la rama de realimentación el amplificador
trabajará como un integrador de señales.
Y como
De donde Vs(t) es igual a:
Para descargar el voltaje inicial en el capacitor (t=0), se dispone un interruptor en paralelo
con C para descargarlo antes de utilizar el integrador o simplemente para inicializarlo.
Para estabilizar una señal de entrada el circuito puede tener la siguiente configuración.
DISEÑO ELECTRONICO ANALOGO
182
Figura h. Configuración de estabilización señal de entrada del Amplificador operacional
en modo integrador
7. CIRCUITO DIFERENCIADOR
El circuito tiene como salida la derivada de la señal de entrada.
Figura i. Amplificador operacional en modo diferenciador.
DISEÑO ELECTRONICO ANALOGO
183
Hasta ahora se han supuesto amplificadores ideales. Aunque los actuales amplificadores
se aproximan al modelo en términos de ganancia y resistencia de entrada y salida, sus
desequilibrios en los circuitos internos pueden provocar respuestas no adecuadas.
DISEÑO ELECTRONICO ANALOGO
184
8. AMPLIFICADOR DIFERENCIAL
Figura j. Amplificador diferencial
Para aplicaciones con sensores que entregan señales pequeñas comparables con
señales de ruido (voltajes inducidos no deseados) se recurre a la utilización de
amplificadores diferenciales, los cuales presentan idealmente un rechazo al modo común
permiten la amplificación de la señal deseada en modo diferencial.
En el circuito dado, se tiene:
De Va se tiene que
DISEÑO ELECTRONICO ANALOGO
185
Y reemplazando en Vs
Para obtener el voltaje de salida Vs en función de los voltajes V1 y V2
Considerando:
Donde Vd es el voltaje en modo diferencial y Vc el voltaje en modo común.
El voltaje de salida es:
De donde:
Para obtener las ganancias en modo común y en modo diferencial tenemos.
DISEÑO ELECTRONICO ANALOGO
186
El modelo real del amplificador diferencial es:
El rechazo al modo común es entonces:
O en decibelios
9. AMPLIFICADORES DE INSTRUMENTACIÓN
Un amplificador de instrumentación se caracteriza por tener:
·
Alta impedancia de entrada.
·
Alto rechazo de de señales en modo común CMRR, superior a 100 dB.
·
Ganancia estable y que pueda ser variable con una única resistencia y sin que se
contrapongan directamente ganancia y ancho de banda.
·
Tensión y corriente de desequilibrio (offset) bajas y con pocas derivas.
·
Impedancia de salida baja.
Existen convencionalmente dos tipos de amplificadores de instrumentación
Amplificador de instrumentación basado en dos amplificadores y Amplificador basado en
tres amplificadores (figura 67k).
DISEÑO ELECTRONICO ANALOGO
187
El amplificador de instrumentación cuenta con tres amplificadores dos seguidores de
tensión para mejorar la impedancia de entrada del amplificador y un amplificador
diferencial para rechazar las señales en modo común.
Figura k. Amplificador de instrumentación basado en tres amplificadores.
Las tensiones de salida de los amplificadores inversores ideales A1 y A2 está dada por
las tensiones Va y Vb, de tal forma que:
De donde Va está dada por
Y Vb por
DISEÑO ELECTRONICO ANALOGO
188
El voltaje de salida de la etapa del amplificador diferencial es:
Reemplazando tenemos que
La ecuación anterior muestra que la ganancia del amplificador de instrumentación puede
ser controlada por Rg. La figura 67l muestra el diagrama esquemático del amplificador de
instrumentación INA326 .
Figura l. Diagrama del amplificador de instrumentación INA326.
El mercado de amplificadores de instrumentación es muy amplio y existe una gran
variedad de ellos con grandes ventajas y un sinnúmero de aplicaciones, el ingeniero de
instrumentación deberá siempre conocer el más apropiado para cada aplicación. Algunas
referencias
económicas
son:
INA101
AD
524,
INA105
AD
624
INA326. AMP01 Analog Devices, AD620 LM 363 National
Otras consideraciones que se deben tener en cuenta para la utilización de amplificadores
de instrumentación es su protección contra interferencias externas que afecten su
funcionamiento.
DISEÑO ELECTRONICO ANALOGO
189
10. AMPLIFICADOR DE CARGA
Figura m. Diagrama de un amplificador de carga.
Es un circuito cuya impedancia de entrada es un elemento capacitivo. Su función es
obtener una tensión de salida proporcional a la carga del capacitor y entregarla a una
tensión de salida baja. En general es un convertidor de carga a tensión; su configuración
inicial fue propuesta por W.P Kistler y consistió en un amplificador operacional con un
condensador como única rama de realimentación.
Sus aplicaciones más importantes se tienen en acondicionamiento de sensores con
impedancia de salida muy alta, especialmente en sensores capacitivos y piezoresistivos
Para el amplificador de carga de la figura 67m su principio de funcionamiento es la
transferencia de carga del sensor a un condensador conocido Co y medir la tensión en
bornes a través del amplificador, el voltaje de salida es:
Donde el factor de amplificación G es mucho mayor a 1.
La respuesta del circuito anterior es compleja y debe considerar los siguientes factores:
·
Capacitancias de los conductores.
·
El condensador Co debe ser de precisión.
·
La resistencia de fuga del sensor y del cable.
·
La corriente de desequilibrio del amplificador.
DISEÑO ELECTRONICO ANALOGO
190
11. AMPLIFICADOR DE AISLAMIENTO
Son amplificadores en los que existe un aislamiento físico entre la entrada y la salida. La
característica esencial de éstos dispositivos es la de tener alta tensión de ruptura (alta
resistencia) y bajos niveles de fuga (baja capacidad); son valores usuales 10 W y 10pF.
Su utilización es adecuada cuando existen altos niveles de tensión asociados a los
parámetros a medir.
Figura n. Amplificador de aislamiento
El terminal de referencia del circuito de entrada es independiente óhmicamente del
terminal de referencia del circuito de salida.
En algunas oportunidades y para aplicaciones muy particulares (tratamiento de señales
bioeléctricas) la señal de referencia de la alimentación también se encuentra aislada de la
señal de salida.
Figura o. Representación del amplificador de aislamiento.
El paso de las señales y de la energía de alimentación entre etapas de un amplificador de
aislamiento se realiza normalmente mediante transformadores u opto acopladores.
DISEÑO ELECTRONICO ANALOGO
191
Existen en el mercado de semiconductores gran variedad de estos tipos de
amplificadores, haciendo aclaración de que estos no son ni amplificadores de
instrumentación, ni diferenciales, ni operacionales, pero pueden existir modelos que
pueden albergar estos dispositivos con características muy especiales.
Entre éstos dispositivos podemos encontrar el AD202 que es un amplificador de
aislamiento.
12. SELECCIÓN DEL AMPLIFICADOR OPERACIONAL ADECUADO
Debido a su versatilidad y facilidad de aplicación, el AO es hoy en día el circuito
integrado lineal más ampliamente utilizado. Debido a la popularidad del AO, hay
disponibilidad de muchos tipos diferentes los cuales ofrecen una gran variedad de
características. ¿Cuál dispositivo utilizar para una aplicación específica? es una
cuestión que debe ser respondida. Si las características del dispositivo seleccionado
no son adecuadas, el comportamiento del sistema global puede ser menor al deseado.
Si el dispositivo seleccionado es demasiado complejo para la tarea, el costo del
sistema se incrementará innecesariamente. Los siguientes parágrafos proporcionan un
resumen de varios tipos de AOs.
13. TALLER
1. Se requiere diseñar un amplificador de tensión, el cual se excita con una fuente de
señal de 10mV de amplitud y tiene una resistencia interna de 10k . Se pretende
suministrar una salida pico de 3V a una carga de 1k .
(a) ¿Cuál es la ganancia de tensión desde la fuente hasta la carga?
(b) Si la corriente pico disponible de la fuente es de 0.1µA. ¿Cuál es la resistencia mínima
permitida?
(c) Para el diseño con este valor de R
i
, encontrar la ganancia total de corriente y de
potencia.
2. Para el circuito de la Fig.25,
(i) Encontrar la ganancia de tensión en dB (Nota: se debe hacer el análisis total)
(ii) Si v
1
= 3v
2
, encontrar el valor de la tensión de salida.
DISEÑO ELECTRONICO ANALOGO
192
Figura .25: Amplificador de instrumentación
3. Determinar la ganancia de tensión en el circuito de la Fig. 26, suponiendo que el AO es
ideal. Todas las resistencias, como se ve, son iguales.
Figura 26: Amplificador inversor.
4. La tensión de salida de un AO determinado varía entre -10V y +10V , y produce o
absorbe una corriente máxima de 20mA. El límite de la velocidad de conmutación es S
R
=
10V/µs. Este AO se emplea en el circuito de la Fig. 27
Figura 27: Amplificador no inversor.
(a) Hallar el ancho de banda del AO.
(b) Para la frecuencia de 1 kHz y R
L
= 1k . ¿Qué tensión máxima de salida es posible sin
distorsión?
DISEÑO ELECTRONICO ANALOGO
193
(c) Para una frecuencia de 1 kHz y R
L
= 100 . ¿Qué tensión máxima de salida es posible
sin distorsión?
(d) Para una frecuencia de 1 MHz y R
L
= 1k . ¿Qué tensión máxima de salida es posible
sin distorsión?
(e) Si R
L
= 1k y v
s
(t) = 4 sen(2
× 10
6
t), dibujar la forma de onda de salida en función del
tiempo.
5. Se desea diseñar un amplificador que pueda producir una tensión de salida senoidal de
100kHz con una amplitud de 5V . ¿Cuál es la mínima especificación de tiempo de subida
tolerable para el AO?
6. Una forma de medir el S
R
de un AO es aplicar una onda senoidal (o una onda
cuadrada) a la entrada del amplificador, y aumentar la frecuencia hasta que la forma de
onda de salida sea triangular. Suponer que la señal de entrada de 1 MHz produce una
forma de onda de salida triangular con un valor pico a pico de 4 V . ¿Cuál es la
especificación de tiempo de subida para el AO?
7. La tensión de salida de un AO determinado varía entre -10 V y +10 V , y produce o
absorbe una corriente máxima de 30 mA. El límite de la velocidad de conmutación es S
R
=
10 V/µs. Este AO se emplea en el circuito de la Fig. 28.
Figura 28: Amplificador inversor.
(a) Hallar el ancho de banda del AO.
(b) Para la frecuencia de 6 kHz y R
L
= 200 . ¿Qué tensión máxima de salida es posible
sin distorsión?
(c) Para una frecuencia de 6 kHz y R
L
= 10 k . ¿Qué tensión máxima de salida es posible
sin distorsión?
(d) Para una frecuencia de 200kHz y R
L
= 10 k . ¿Qué tensión máxima de salida es
posible sin distorsión?
(e) Si R
L
= 1 k y v
s
(t) = 5 sen(2
× 10
6
t), dibujar la forma de onda de salida en función del
tiempo.
DISEÑO ELECTRONICO ANALOGO
194
8. La hoja de datos de un cierto AO muestra una ganancia de tensión de continua en lazo
abierto de 80 dB, una impedancia de entrada de 100 k , una impedancia de salida de 50
y un ancho de banda de ganancia unidad de 10
6
Hz. Dibuje un modelo lineal del AO,
incluyendo los valores numéricos de todos los componentes.
9. Considere el amplificador que se muestra en la Fig. 28. Con una tensión de entrada en
continua nula para la fuente de excitación, se desea que la tensión de salida en continua
no supere los 10 mV en magnitud.
(a) Ignorando los demás errores en continua, ¿cuál es la tensión máxima de
desplazamiento permitida para el AO?
(b) Ignorando los demás errores en continua, ¿cuál es la corriente máxima de polarización
permitida para el AO?
(c) Mostrar la manera de añadir una resistencia al circuito, incluyendo su valor, de modo
que se anulen las corrientes de polarización.
(d) Suponiendo que se utiliza la resistencia del punto (c) e ignorando la tensión de
desplazamiento, ¿cuál es la corriente máxima de desviación permitida para el AO?
10. El amplificador diferencial para instrumentación de la Fig. 29 debe tener una ganancia
de 103 con una precisión del 0.1%. ¿Un LM741 reunirá los requisitos para esta
aplicación? ¿Cuál será la ganancia que debe tener el AO? Suponer que la ganancia en
lazo abierto del AO tiene una tolerancia de +100%, -50%. Despreciar los efectos de R
i
y
de R
o
en el AO.
Figura 29: Amplificador diferencial.
11. El AO de la Fig. 3.30, una vez que su tensión de offset se ajusta a cero, debe tener
una tensión de offset referida a la entrada inferior a 1 mV en magnitud para tensiones de
entrada en modo común entre +10 V y -10 V . ¿Cuál es el máximo CMRR permisible para
que el amplificador pueda realizar esta tarea? ¿Puede un LM741 reunir los requisitos
exigidos? (El CMRR para el LM741 es de 80 dB mínimo).
12. Calcular las corrientes de polarización y la ganancia de tensión de pequeña señal a
baja frecuencia de un AO LF355, utilizando tensiones de polarización de ±15 V.
DISEÑO ELECTRONICO ANALOGO
195
13. El circuito mostrado en la Fig. 30 es el modelo de una red con AO en el cual se
muestra la tensión de offset y las corrientes de polarización.
Figura 30: Red donde se indican las corrientes de polarización y tensión
de offset.
(a) Determinar la componente de la señal de v
o
en términos de la diferencia de las señales
v
2
- v
1
.
(b) Determinar la componente de v
o
producida por I
io
/2.
(c) Para v
1
= v
2
, determinar la tensión total offset en la salida.
(d) Evaluar la tensión offset de salida para V
io
= 6 mV , I
io
= 0.2 µV , I
b
= 0.5 µA, R
1
=R
3
=
50 k , R
2
= R
4
= 500 k .
14. Considerar circuito de la Fig. 3.32, donde V
1
y V
2
representan tensiones indeseables.
(a) Demostrar que si
, entonces
(b) Demostrar también que, si
, entonces
DISEÑO ELECTRONICO ANALOGO
196
Figura 31: Amplificador con tensiones indeseables.
15. Para el amplificador de instrumentación mostrado en la Fig. 3.33.
Figura 31: Amplificador de instrumentación.
(a)
Verificar
que
Notar que se puede ajustar la ganancia variando R.
(b) Deteminar las impedancias que ven las fuentes V
1
y V
2
.
DISEÑO ELECTRONICO ANALOGO
197
14. FILTROS ACTIVOS
Un filtro es un dispositivo, que tiene como función atenuar determinadas frecuencias del
espectro de la señal de entrada y permitir el paso de las demás. Dentro de las ventajas de
los filtros activos tenemos:
·
Facilitan el diseño de filtros complejos mediante la asociación de etapas simples.
·
Permiten eliminar las inductancias voluminosas, presentes en bajas frecuencias.
·
Permiten agilizar y flexibilizar proyectos.
·
Proporcionan una ganancia.
·
Además pueden tener algunos inconvenientes como el requerir alimentación para la
polarización de los amplificadores, su respuesta en frecuencia puede estar limitada al
tipo de amplificador utilizado, además su utilización está limitada a circuitos de baja
potencia.
Los filtros son sistemas diseñados para obtener una determinada función de
transferencia. Los filtros lineales pasivos están compuestos por una combinación de
resistores, capacitores e inductores. Este tipo de filtros nos permiten obtener una gran
variedad de funciones de transferencia pero, por lo general, requieren de una gran
cantidad de componentes. Por este motivo se hace necesario buscar algún tipo de
alternativa.
Los filtros activos son sistemas que contienen amplificadores y que nos permiten diseñar
una gran cantidad de funciones de transferencia diferentes. Estos sistemas producen
ganancia y, además, suelen consistir sólo en resistores y capacitores junto con algún tipo
de circuito integrado. Los amplificadores operacionales cuando se combinan con
resistores y capacitores pueden simular el comportamiento de los filtros pasivos
constituidos por inductancias y capacitancias.
En función del tipo de respuesta se puede distinguir entre diferentes tipos de filtros. Los
más conocidos son los filtros de Butterworth y los filtros de Chebyshev. Los primeros se
caracterizan en tener una respuesta plana en la banda de paso (no tienen rizado) y la
caída fuera de la banda de paso no es demasiado abrupta. Los filtros de Chebyshev
tienen rizado en la banda de paso, pero presentan una caída bastante más abrupta.
Clasificación de los filtros: Se pueden clasificar de acuerdo a la función o trabajo a
realizar, a la tecnología implementada y a la función matemática utilizada para obtener
una curva específica.
a) De acuerdo a la función o trabajo a realizar pueden ser:
Filtro pasa bajo (PB): Sólo permiten el paso a frecuencias inferiores a la de corte fc,
las demás son atenuadas. En la figura 68, se muestra la respuesta de un filtro PB.
DISEÑO ELECTRONICO ANALOGO
198
Figura 14. Gráficas de la ganancia en función de la frecuencia para un filtro pasa bajo
Filtro pasa alto (PA): El filtro pasa alto se caracteriza por atenuar las frecuencias bajas y
solo permitir el paso a aquellas superiores a la fc. En la figura 68a se encuentra la
respuesta del filtro.
Figura 14a. Gráfica de la ganancia en función de la frecuencia para un filtro pasa alto.
Filtro pasa banda (PF): Permite el paso de frecuencias que se encuentran en una banda
delimitada por una frecuencia de corte inferior fc1 y otra superior fc2, como es lógico las
frecuencias situadas por fuera de ésta banda quedan atenuadas. En la figura 68b se
encuentra la respuesta del filtro.
DISEÑO ELECTRONICO ANALOGO
199
Figura 14b. Gráfica de la ganancia en función de la frecuencia para un filtro pasa banda
Filtro rechazo de banda (RF): Permite el paso de las frecuencias no situadas en la
banda, delimitada por la frecuencia de corte inferior fc1 y la frecuencia de corte superior
fc2, es decir la frecuencias contenidas en la banda son atenuadas. En la figura 14c se
encuentra la respuesta del filtro.
Dentro de la respuesta de los filtros reales se definen bandas de frecuencias para su
estudio e interpretación.
Por ejemplo para un filtro pasa bajo PB, se definen Banda de paso 0 ... fc, Banda de
transición (fc ... fs), Banda de corte por encima de fs
Figura 14c. Gráfica de la ganancia en función de la frecuencia para un filtro eliminador de
banda.
DISEÑO ELECTRONICO ANALOGO
200
Figura 14d. Bandas para un filtro pasa bajo y un filtro pasa banda. Donde fs. es el punto
en el cual la amplitud se reduce al 10% del valor máximo.
b) Atendiendo a su tecnología pueden ser:
Filtros pasivos: Están construidos por elementos pasivos como resistencias,
inductancias y capacitancias, cuentan con muchas ventajas para el filtrado de señales de
potencia, pero pueden ser demasiado voluminosas en el manejo de bajas frecuencias.
Filtros activos: Cuentan con elementos activos como los amplificadores operacionales y
sus ventajas de operación permiten la construcción de filtros con muy buenas calidades.
Filtros digitales: Convierten las señales a filtrar a señales digitales a través de
conversores A/D, la señal es entonces pasada por el filtro correspondiente y finalmente se
reconvierte a una señal análoga a través de un convertidor D/A.
c) De acuerdo a la función matemática utilizada para obtener la
respuesta del filtro pueden ser:
Los tipos más comunes de aproximaciones son las siguientes: Butterworth y Chevyshev.
Cada uno de ellos cuenta con una función matemática que permite aproximar la curva de
respuesta a la ideal de cada tipo de filtro.
Filtro Butterworth: La función de transferencia del filtro en función de la ganancia Kpb a
w=0, la frecuencia de corte y el orden del filtro n es:
DISEÑO ELECTRONICO ANALOGO
201
El orden del filtro tiene que ver con el número de polos de la función de transferencia o
con el número de redes presentes en la estructura. Mientras mayor sea el orden del filtro
más aproximada será su respuesta a la respuesta ideal del filtro (figura 68e).
Si la frecuencia w es mucho mayor que la frecuencia de corte, puede demostrarse que la
atenuación del filtro viene dada por:
Figura 14e. Respuesta del filtro Butterworth según su orden
Es decir, un filtro Butterworth de primer orden tiene una atenuación de 20 dB/década, el
de segundo orden 40 dB/década y el tercer orden 60 dB/década. Valores con respecto a
la ganancia máxima 20 log Kpb.
DISEÑO ELECTRONICO ANALOGO
202
Filtro Chebyshev: Como pudo observarse para frecuencias de cercanas a las de corte la
respuesta del filtro Butterworth no es aceptable, especialmente si el filtro es de orden bajo.
Los filtros Chebyshev poseen mejor respuesta para este tipo de frecuencias pero
presentan un rizado (RIPPLES) en la banda pasante. La función de transferencia dada
por Chebyshev es:
Donde
Kpb: es la ganancia del filtro cuando la frecuencia es cero.
wc: es la frecuencia de corte
E: Constante que determina la amplitud del rizado
Cn: Polinomio de Chebyshev
El Polinomio de Chebyshev está dado por:
Cuya formula recurrente puede ser demostrada como:
DISEÑO ELECTRONICO ANALOGO
203
El número de rizados presentes en la banda de paso es igual al orden del filtro y su
amplitud depende del parámetro E.
El porcentaje de atenuación del filtro Chebyshev puede encontrarse a partir de la
siguiente expresión.
Donde:
n: Orden del filtro.
E: Constante que determina la amplitud del rizado.
wc: Frecuencia de corte.
Y donde la amplitud de los rizos está dada por:
Existen diferentes configuraciones de filtros Chebyshev y Butterworth a partir de
amplificadores.
DISEÑO DE FILTROS
En este apartado se describe un método de diseño de filtros del tipo Butterworth y
Chebyshev. En principio se suponen resistencias de 1 ohmio para los filtros paso-bajo y
condensadores de 1 faradio para los filtros paso-alto. Posteriormente, se realizar las
transformaciones adecuadas para obtener los valores finales de los componentes.
Todos los filtros se obtienen combinando configuraciones de segundo y tercer orden.
El procedimiento de diseño de filtros se divide en las siguientes etapas:
1.
Especificar los parámetros característicos del filtro.
2.
Encontrar el orden del filtro en función de sus especificaciones.
3.
Obtener el factor de escala para los valores de los componentes según las tablas
de los filtros.
4.
Realizar el circuito según los esquemas normalizados de la figura.
Los parámetros característicos de un filtro son los siguientes:
Ap: atenuación en dBs en la banda de paso
As: atenuación en dBs en la banda de rechazo
DISEÑO ELECTRONICO ANALOGO
204
fp: frecuencia a la que se presenta Ap
fs: frecuencia a la que se presenta As
El orden que debe tener un filtro para cumplir unas determinadas especificaciones
puede determinarse a partir de las siguientes expresiones:
Se tomará como orden del filtro, el primer entero mayor o igual que nB para filtros de
Butterworth y nC para filtros de Chebyshev.
Una vez determinado el orden del filtro, se debe hacer uso de las tablas para filtros
activos para configurarlo. Para desarrollar etapas de orden superior a tres deben
combinarse etapas de segundo y tercer orden. Los valores mostrados en las tablas
están calculados para un frecuencia de corte de 1 rad/s. Para los filtros paso-bajo, los
valores de los condensadores se obtienen de la tabla y se sustituyen como Ci en la
siguiente fórmula que nos permite determinar los valores adecuados de los
condensadores Cn en el circuito para un valor de R fijado y una frecuencia de corte fp:
Para los filtros paso alto, se hace de forma similar pero ahora son los valores de los
condensadores los que se fijan y son los valores de las resistencias Ri los que se
toman de la tabla. Para la resistencia Rn a utilizar en el filtro paso alto final, se tiene
que ésta viene dada por:
DISEÑO ELECTRONICO ANALOGO
205
DISEÑO ELECTRONICO ANALOGO
206
15. CONVERTIDORES DE FRECUENCIA A VOLTAJE
Los convertidores de frecuencia a voltaje son circuitos integrados que convierten un
voltaje de entrada análogo en un tren de pulsos cuya frecuencia de salida es proporcional
al nivel de entrada (figura 69). Se utilizan en aplicaciones de conversión análoga a digital
donde la velocidad no es un factor crítico, también opera como convertidores de
frecuencia a voltaje y pueden ser utilizados como convertidores de señales digitales a
análogas de baja frecuencia.
Dentro de los convertidores de señales de voltaje a frecuencia o de frecuencia a voltaje se
encuentran: LM331 de National semiconductor, AD650 de Analog Devices, VFC32 de
Burr Brown, XR2206 y XR4151 de Exar (Ver hojas de datos).
Algunas aplicaciones de los convertidores de Frecuencia a Voltaje son:
·
Control de velocidad de motores.
·
Medición de flujo
·
Demodulación de FM
·
Transmisión de datos.
·
Aislamiento de sistemas
·
Enlaces ópticos
·
Interface de transductores con sistemas digitales.
·
Telemetría de FM de bajo costo.
·
Aislamiento de señales análogas
·
Multiplexación análoga.
Figura 15. Aplicación típica de un convertidor de V-F
16. CLASES DE FUENTES
Fuentes de señal referenciada: Una señal es referenciada, cuando de alguna forma ésta
se conecta a un sistema de puesta a tierra, tales como generadores, fuentes de poder y
transformadores.
DISEÑO ELECTRONICO ANALOGO
207
Para el caso de las señales referenciadas cada señal a medir es captada directamente, o
por medio de un transductor adecuado, mediante un solo hilo conductor y tiene como
REFERENCIA el conductor a tierra del sistema que genera la señal.
Como otros ejemplos de señales referenciadas se tienen las señales no aisladas
generadas por transductores y sensores, las generadas por fuentes de señal conectadas
a la red de potencia y aquellas que se utilizan para acondicionamiento de la señal de
dispositivos conectados a la red.
Figura 16. Fuente de señal referenciada
Fuentes de señales flotantes: Una señal es flotante cuando en su origen no está
conectada en forma alguna a tierra, es decir, la señal es captada directamente, o por
medio de un transductor adecuado, mediante un par de conductores de los cuales uno
sirve como conductor que transporta la señal y el otro sirve como conductor de regreso.
Ninguno de los conductores están conectados a tierra, así las variaciones de la señal
parecen flotar de un conductor con respecto al otro conductor.
Como ejemplos de señales flotantes se tienen las señales aisladas generadas por
transductores y sensores como las termocuplas, las señales fisiológicas, las generadas
por fuentes de señal aisladas no conectadas a la red, como el caso de los instrumentos
portátiles y aquellas que se utilizan para acondicionamiento de señal, dispositivos como
transformadores de aislamiento, aisladores ópticos y amplificadores de aislamiento.
La entrada de estas señales al sistema de conversión AD se hace por medio de uno o
varios circuitos multiplexores e incluye un amplificador de instrumentación de ganancia
programable, alta relación de rechazo en modo común y una muy alta impedancia de
entrada.
DISEÑO ELECTRONICO ANALOGO
208
Figura 16a. Fuentes de señales flotantes
17. CONEXIÓN DE SEÑALES Y FUENTES DE SEÑAL PARA INTERFACES Y
ADQUISICIÓN DE DATOS
Los fabricantes de interfaces para sistemas de adquisición de datos y control ofrecen tres
alternativas de conexión de las señales a medir o detectar a saber:
·
MODO REFERENCIADO CON CONEXION SIMPLE RSE (Referenced Single
Ended)
·
MODO NO REFERENCIADO CON CONEXIÓN SIMPLE NRSE (Non Referenced
Single Ended)
·
MODO DIFERENCIAL DIFF (Differential)
A continuación se describen y comparan estos tres modos de conexión:
Los modos de conexión simple
Los modos referenciados RSE y no referenciado NRSE con conexión simple son aquellos
en los cuales todas las señales análogas de entrada son referenciadas en la interface a
una tierra común. Las señales de entrada se conectan mediante un circuito multiplexor
MUX al terminal positivo del amplificador de instrumentación y el punto de tierra común se
conecta al terminal negativo del amplificador de instrumentación.
Los modos con conexión simple se deben utilizar cuando todas las señales de entrada
reúnen las siguientes características:
·
Son de nivel alto, mayores a 1V.
·
Los cables que se utilizan para conectar la señal análoga miden menos de 3
metros.
·
Todas las señales análogas comparten una misma señal de referencia.
DISEÑO ELECTRONICO ANALOGO
209
Figura 17. Conexión de señales flotantes en modo referenciado con conexión sencilla
Figura 17. Conexión de señales referenciadas a tierra en modo no referenciado (NRSE)
El modo RSE se debe emplear para la conexión de señales flotantes, en cuyo caso las
interfaces proveen el punto de tierra común para las señales externas.
DISEÑO ELECTRONICO ANALOGO
210
El modo NRSE se debe emplear para señales referenciadas a tierra, en cuyo caso la
señal externa suministra su propio punto de referencia a tierra y la tarjeta provee un punto
de conexión aislado.
Conexión simple RSE para señales flotantes
La figura 17b ilustra una conexión típica de señales flotantes a un sistema de adquisición
de datos configurada en el modo referenciado con conexión sencilla RSE.
Conexión simple para señales referenciadas a tierra
La figura 17c ilustra la conexión de una señal referenciada a tierra por medio de un
sistema de adquisición de datos configurada en el modo no referenciado con conexión
sencilla NRSE.
La configuración en el modo NRSE se realiza por hardware, software o una combinación
de ambos. La señal se conecta a la entrada positiva del amplificador de instrumentación y
la referencia local a tierra de la señal se conecta a la entrada negativa del amplificador de
instrumentación.
En algunos modelos de tarjetas esto se hace por medio del terminal marcado
AISENSE/AIGND (analog input sense / analog input ground signal), el cual para esta
configuración no está conectado a tierra. La diferencia de potencial entre la tierra de la
tarjeta y la tierra de la señal aparece como señal de modo común en ambas entradas, -
positiva y negativa - del amplificador de instrumentación y es, por lo tanto, rechazada por
el amplificador.
Por el contrario, si la circuitería de entrada esta referenciada a tierra, como en el caso
RSE, la diferencia entre estos potenciales de tierra aparecerá como un error en el voltaje
medido.
Modo de conexión diferencial: El modo de conexión diferencial es aquel en el cual cada
señal análoga de entrada tiene su propia señal de referencia o conductor de regreso. Este
modo de conexión se logra configurando la interface por hardware, software o una
combinación de ambos en el modo diferencial DIFF.
La señal de entrada se conecta a la entrada positiva del amplificador de instrumentación y
la señal de referencia o regreso se conecta a la entrada negativa del amplificador de
instrumentación.
Al configurar la interface de adquisición para el modo diferencial cada señal a medir
requiere dos canales de entrada con sus respectivos multiplexores, uno para la señal de
entrada y otro para la señal de referencia respectiva.
El modo de conexión diferencial se debe utilizar cuando el sistema de adquisición de
datos DAQ posee una de las siguientes características:
·
Las señales de entrada son de muy bajo nivel (menores a 1V).
·
Los conductores de conexión de la señal miden más de 3 metros.
DISEÑO ELECTRONICO ANALOGO
211
·
Los conductores de conexión de la señal se encuentran instalados en ambientes
ruidosos.
·
Cualquiera de las señales de entrada requiere una señal de referencia o retorno
separada.
El modo diferencial reduce el ruido captado e incrementa la relación de rechazo en modo
común. Cada señal de entrada puede flotar dentro de los límites de modo común del
amplificador.
Conexión diferencial DIFF para señales referenciadas a tierra
La figura 17d ilustra la conexión de señales referenciadas a tierra a un sistema de
adquisición de datos configurado en modo diferencial DIFF.
Esta forma de conexión permite que el amplificador de instrumentación rechace tanto el
ruido de modo común que puede acompañar la señal y la diferencia de potencial de tierra
entre la señal a medir y la tierra de la tarjeta.
Conexión diferencial para señales flotantes
La figura 17e ilustra la conexión de una señal flotante a un sistema de adquisición de
datos, configurado en el modo diferencial DIFF.
El empleo de las resistencias con valores entre 10kW y 100kW permite drenar a tierra las
corrientes de polarización del amplificador de instrumentación. La carencia de dichas
resistencias puede producir efectos incontrolables y una posible saturación del
amplificador de instrumentación.
Conclusiones
Para conectar adecuadamente las señales análogas a una interface de adquisición de
datos es necesario:
·
Identificar ampliamente las características de la señal a medir
·
Identificar las posibilidades de configuración de la interface de adquisición de
datos
DISEÑO ELECTRONICO ANALOGO
212
Figura 17d. Conexión de señales referenciadas a tierra en modo diferencial
Figura 17e. Conexión de una señal flotante a un sistema de adquisición de datos
DISEÑO ELECTRONICO ANALOGO
213
18. CONCLUSIONES
Por lo general una norma no es un mandato, son procedimientos de libre aplicación, pero
en algunos casos son de obligatorio cumplimiento tales como en instalaciones eléctricas,
equipo médico, construcciones, etc. En general donde la vida humana pueda correr
graves riesgos.
El sistema internacional de medidas se usa a nivel mundial y es la base de todas las
medidas modernas, consiste en 28 unidades (7 básicas, 2 suplementarias y 19 unidades
derivadas).
Todo sensor eléctrico, mecánico, químico, cuenta con características intrínsecas propias
de los materiales con que fueron construidos. Estas características dependen de la
respuesta del sensor a un estimulo externo. Y pueden ser: características estáticas y
dinámicas.
Dependiendo del tipo de dispositivo a medir existirá una pérdida de potencia en el sistema
donde se mide.
Hoy día los centros de investigación tratan de desarrollar sistemas de medida que no
alteren el medio, es así como podemos ya obtener mediciones de temperatura a través de
infrarrojos, mediciones de caudal a través de ultrasonido, utilizando rayos gamma para la
detección de niveles y caudales, etc.
Cuando debido a este tipo de circunstancias se altera la variable medida, se dice que hay
un error por carga, que se refleja en su impedancia de entrada.
Para obtener un error por carga mínimo es necesario que la impedancia de entrada del
sensor sea alta.
Las siguientes dos deducciones son muy importantes y siempre se deberán tomar en
cuenta en el diseño y montaje de un sistema de instrumentación:
1. El error relativo de interferencia disminuye al bajar la impedancia de salida del
transductor, siendo nulo cuando lo es dicha impedancia, lo que generalmente se
recomienda y se utiliza en el diseño de sensores.
2. El error relativo de interferencia disminuye en la misma proporción en que
aumenta la señal de salida del transductor, por lo anterior se recomienda una
etapa amplificadora lo más cerca posible al sensor.
Un dispositivo de medida analógico es aquel cuya salida varía de forma continua y
mantiene una relación fija con la entrada. La utilización de instrumentos análogos en la
actualidad está muy extendido, a pesar que los instrumentos digitales crecen de manera
exponencial en número, versatilidad y en aplicaciones. Es lógico todavía pensar en que
los instrumentos analógicos se sigan utilizando durante los próximos años y que para
algunas aplicaciones no puedan ser sustituidos.
DISEÑO ELECTRONICO ANALOGO
214
La sensibilidad de un instrumento de bobina móvil aumenta cuando: Se aumenta la
densidad de flujo magnético, Se aumenta el número de espiras, Se aumenta el área de
las espiras, Se disminuye la constante de par Km.
Para utilizar de forma correcta un osciloscopio analógico necesitamos realizar tres ajustes
básicos:
·
La atenuación ó amplificación que necesita la señal. Utilizar el mando AMPL. para
ajustar la amplitud de la señal antes de que sea aplicada a las placas de deflexión
vertical. Conviene que la señal ocupe una parte importante de la pantalla sin llegar
a sobrepasar los límites.
·
La base de tiempos. Utilizar el mando TIMEBASE para ajustar lo que representa
en tiempo una división en horizontal de la pantalla. Para señales repetitivas es
conveniente que en la pantalla se puedan observar aproximadamente un par de
ciclos.
·
Disparo de la señal. Utilizar los mandos TRIGGER LEVEL (nivel de disparo) y
TRIGGER SELECTOR (tipo de disparo) para estabilizar lo mejor posible señales
repetitivas.
Las resistencias PTC son utilizadas en la detección de umbrales de temperatura
(protecciones térmicas, detectores de incendios). Ya que
Rmax
es mucho mayor que R
min las resistencias PTC se comportan como un interruptor que se abre y se cierra en las
proximidades de Tc.
Para conectar adecuadamente las señales análogas a una interface de adquisición de
datos es necesario:
·
Identificar ampliamente las características de la señal a medir
·
Identificar las posibilidades de configuración de la interface de adquisición de
datos
Una forma de onda es la representación gráfica o ecuación de una señal (de una onda).
Un sistema general de instrumentación consta de 6 niveles a saber:
·
Sensores
·
Acondicionamientos de señales
·
Digitalización y multiplexación
·
Procesamiento, análisis y control
·
Redes de comunicación
·
Actuadores
El sensor tiene como función básica adquirir señales provenientes de sistemas físicos
para ser analizadas, por lo tanto se podrá encontrar en el medio tantos sensores como
señales físicas requieran ser procesadas. Basados en el principio de conversión de
energía el sensor tomará una señal física (fuerza, presión, sonido, temperatura, etc.) y la
convertirá en otra señal (eléctrica, mecánica óptica, química, etc.) de acuerdo con el tipo
de sistema de instrumentación o control implementado.
DISEÑO ELECTRONICO ANALOGO
215
La sensibilidad de los sensores piezoeléctricos aumenta cuando el sensor entra en
resonancia, el margen de utilización del sensor se encuentra en su zona plana y en
ningún caso cuentan con respuesta en corriente continua.
Los sensores piroeléctricos cuentan con una respuesta más rápida que los termopares,
empleándose incluso para la detección de pulsos de radiación de picosegundos y con
energías desde los nanojulios hasta julios.
Los sensores termoeléctricos son dispositivos que presentan gran alcance de medida
(200°C a 3000°C), baja sensibilidad (5 a 75 µV/°C) y una respuesta no lineal, pero son de
alta fiabilidad, buena estabilidad, rápida respuesta, relativo bajo costo además son
componentes robustos y sencillos.
Un aspecto importante en el acondicionamiento de sensores resistivos utilizando puentes
de medida, es la necesidad de utilizar fuentes de alimentación estables, ya que sus
fluctuaciones conllevan a errores en los resultados de las mediciones.
Para aplicaciones con sensores que entregan señales pequeñas comparables con
señales de ruido (voltajes inducidos no deseados) se recurre a la utilización de
amplificadores diferenciales, los cuales presentan idealmente un rechazo al modo común
permiten la amplificación de la señal deseada en modo diferencial.
Un amplificador de instrumentación se caracteriza por tener:
·
Alta impedancia de entrada.
·
Alto rechazo de de señales en modo común CMRR, superior a 100 dB.
·
Ganancia estable y que pueda ser variable con una única resistencia y sin que se
contrapongan directamente ganancia y ancho de banda.
·
Tensión y corriente de desequilibrio (offset) bajas y con pocas derivas.
·
Impedancia de salida baja.
Para la utilización de amplificadores de instrumentación se debe tener en cuenta la
protección contra interferencias externas que afecten su funcionamiento.
Una de las aplicaciones más importantes del amplificador de carga es el
acondicionamiento de sensores con impedancia de salida muy alta, especialmente en
sensores capacitivos y piezoresistivos.
Los amplificadores de aislamiento se utilizan cuando existen altos niveles de tensión
asociados a los parámetros a medir en los que existe un aislamiento físico entre la
entrada y la salida. La característica esencial de éstos dispositivos es la de tener alta
tensión de ruptura (alta resistencia) y bajos niveles de fuga (baja capacidad); son valores
usuales 10 W y 10pF.
Los filtros activos cuentan con elementos (activos) como los amplificadores operacionales
y sus ventajas de operación permiten la construcción de filtros con muy buenas calidades,
y tienen las siguientes ventajas:
DISEÑO ELECTRONICO ANALOGO
216
·
Facilitan el diseño de filtros complejos mediante la asociación de etapas simples.
·
Permiten eliminar las inductancias voluminosas, presentes en bajas frecuencias.
·
Permiten agilizar y flexibilizar proyectos.
·
Proporcionan una ganancia.
·
Además pueden tener algunos inconvenientes como el requerir alimentación para la
polarización de los amplificadores, su respuesta en frecuencia puede estar limitada al
tipo de amplificador utilizado, además su utilización está limitada a circuitos de baja
potencia.
Algunas aplicaciones de los convertidores de Frecuencia a Voltaje son:
·
Control de velocidad de motores.
·
Medición de flujo
·
Demodulación de FM
·
Transmisión de datos.
·
Aislamiento de sistemas
·
Enlaces ópticos
·
Interface de transductores con sistemas digitales.
·
Telemetría de FM de bajo costo.
·
Aislamiento de señales análogas
·
Multiplexación análoga.
Una señal es referenciada, cuando de alguna forma ésta se conecta a un sistema de
puesta a tierra, tales como generadores, fuentes de poder y transformadores.Para el caso
de las señales referenciadas cada señal a medir es captada directamente, o por medio de
un transductor adecuado, mediante un solo hilo conductor y tiene como REFERENCIA el
conductor a tierra del sistema que genera la señal.
Una señal es flotante cuando en su origen no está conectada en forma alguna a tierra, es
decir, la señal es captada directamente, o por medio de un transductor adecuado,
mediante un par de conductores de los cuales uno sirve como conductor que transporta la
señal y el otro sirve como conductor de regreso. Ninguno de los conductores están
conectados a tierra, así las variaciones de la señal parecen flotar de un conductor con
respecto al otro conductor.
DISEÑO ELECTRONICO ANALOGO
217
III. CIRCUITOS OSCILADORES
El Oscilador es un circuito que genera una señal periódica, es decir, que produce una
señal periódica a la salida sin tener ninguna entrada periódica. Los osciladores se
clasifican en armónicos, cuando la salida es sinusoidal, o de relajación, si generan una
onda cuadrada.
Un oscilador a cristal es un oscilador armónico cuya frecuencia está determinada por un
cristal de cuarzo o una cerámica piezoeléctrica.
Los sistemas de comunicación suelen emplear osciladores armónicos, normalmente
controlados por cristal, como oscilador de referencia. Pero también osciladores de
frecuencia variable. La frecuencia se puede ajustar mecánicamente (condensadores o
bobinas de valor ajustable) o aplicando tensión a un elemento, estos últimos se conocen
como osciladores controlados por tensión o VCO, es decir, osciladores cuya frecuencia de
oscilación depende del valor de una tensión de control. Y también es posible hallar
osciladores a cristal controlados por tensión o VCXO.
Parámetros del oscilador
·
Frecuencia: es la frecuencia del modo fundamental
·
Margen de sintonía, para los de frecuencia ajustable, es el rango de ajuste
·
Potencia de salida y rendimiento. El rendimiento es el cociente entre la potencia
de la señal de salida y la potencia de alimentación que consume
·
Nivel de armónicos: potencia del armónico referida a la potencia del fundamental,
en dB
·
Pulling: variación de frecuencia del oscilador al variar la carga
·
Pushing: variación de frecuencia del oscilador al variar la tensión de alimentación
·
Deriva con la temperatura: variación de frecuencia del oscilador al variar la
temperatura
·
Ruido de fase o derivas instantáneas de la frecuencia
·
Estabilidad de la frecuencia a largo plazo, durante la vida del oscilador
OSCILADORES COLPITTS Y HARTLEY:
Son dos esquemas clásicos de oscilador para comunicaciones con un único elemento
activo, que puede ser un BJT o un MOSFET. Los circuitos equivalentes para c.a. de las
versiones con BJT están representados en la figura siguiente:
Figura 100. Osciladores (a) Colpitts y (b) Hartley
DISEÑO ELECTRONICO ANALOGO
218
El Colpitts emplea dos condensadores y una bobina en la red de realimentación, mientras
que el Hartley emplea dos bobinas y un condensador. El análisis de estos osciladores es
similar, así que nos limitaremos a estudiar el Colpitts, que se emplea más a menudo.
En la figura 100a se representa el esquema del oscilador Colpitts, redibujado para poner en evidencia la red de
realimentación. También en esta figura se indica el punto M, elegido para abrir el lazo de realimentación. En
la figura 6.6b se muestra el circuito que resulta después de abrir el lazo y de sustituir el BJT por su circuito
equivalente en pequeña señal. Notar que la impedancia de entrada en el punto de inicio es Z
in
= r
.
Figura 100a. (a) Circuito oscilador Colpitts modificado para calcular la ganancia de lazo y
(b) el circuito equivalente para pequeña señal
Puesto que v = v
x
, la tensión v
o
se puede calcular como
siendo
La relación entre y v
x
v
o
es
Así la ganancia de lazo queda
Sustituyendo en la ecuación anterior las expresiones correspondientes a Z
1
, Z
L
y Z
2
, obtenemos
Aplicando el criterio de Barkhausen para la fase,
A
= 0, resulta
, es decir que la
frecuencia de oscilación será
DISEÑO ELECTRONICO ANALOGO
219
Sustituyendo este resultado en la expresión de A y aplicando el criterio de Barkhausen para el módulo, A
1, obtenemos la condición de arranque.
El circuito completo, incluyendo los elementos de polarización, se muestra en la figura
100b. Además de la configuración analizada con el BJT en emisor común, la más
habitual, existen otras con el BJT en base común y en colector común. Y naturalmente,
con MOSFET también existen tres configuraciones.
Figura 100b.
Circuito oscilador Colpitts incluyendo los elementos de polarización
OSCILADOR DE TRANSISTORES ACOPLADOS:
Es un circuito oscilador típico para receptores de RF integrados en un solo chip. En la
figura 100c se muestra el esquema con MOSFET pero también se puede realizar con
BJT. El circuito tiene salida diferencial, vo = v1 v2, y en c.a. por simetría v1 = v2.
DISEÑO ELECTRONICO ANALOGO
220
Figura 100c. Oscilador con transistores acoplados
En la figura 100d (a) se muestra el circuito equivalente en pequeña señal y en ella se
indica el punto M, elegido para abrir el lazo. La impedancia Z representa el circuito R
L
LC
en paralelo. En la figura 100d (b) se muestra el circuito que resulta después de abrir el
lazo y de sustituir el MOSFET por su circuito equivalente en pequeña señal. Notar que la
impedancia de entrada en el punto de inicio es infinita.
Figura 100d. Circuito equivalente del de la figura 6.7 para c.a. y (b) su circuito equivalente
en pequeña señal modificado para calcular la ganancia de lazo.
En la figura 100d se observa que la suma de las corrientes en los dos generadores debe
ser nula, por consiguiente v1 = v2.
Por una parte
y por otra
Combinando las anteriores ecuaciones se obtiene la siguiente ganancia de lazo
DISEÑO ELECTRONICO ANALOGO
221
Siendo Z
Sustituyendo Z en la anterior expresión de A
obtenemos
Aplicando el criterio de Barkhausen para la fase,
A
= 0, resulta
, es decir
que la frecuencia de oscilación será
Sustituyendo este resultado en la expresión de A
y aplicando el criterio de Barkhausen
para el módulo, A
1, obtenemos la condición de arranque
OTRO CONCEPTO DEL OSCILADOR:
Es posible asimilar un oscilador a un circuito RLC. Para explicarlo debemos calcular la
respuesta libre del circuito que hemos representado en la figura 100e.
Figura 100e. Circuito RLC Paralelo
La expresión temporal de vo se puede obtener aplicando la ley de Kirchhoff de las
corrientes
Derivando y multiplicando por L
Las soluciones de esta ecuación diferencial se obtienen resolviendo su ecuación
característica asociada
DISEÑO ELECTRONICO ANALOGO
222
Las raíces de esta ecuación son
Tenemos cinco soluciones posibles dependiendo del valor de K:
Figura 100f. Posibles soluciones del circuito RLC paralelo en función de R.
Las distintas soluciones se han representado en la figura 100f. Las soluciones 1) y 2) son
estables, son las habituales en circuitos RLC pasivos. La solución 3) corresponde a
oscilaciones de amplitud constante que se mantienen indefinidamente. Las soluciones 4)
y 5) son inestables, la 4) corresponde a oscilaciones de amplitud creciente y la 5)
corresponde a una tensión que crece continuamente.
Del resultado anterior se deduce que un oscilador puede entenderse como un circuito LC
asociado a una resistencia negativa. Dicha resistencia es necesaria para compensar la
energía disipada en las resistencias parásitas asociadas al condensador y a la bobina,
principalmente a esta última, en cada oscilación. Inicialmente la resistencia equivalente
total debe ser negativa, para obtener oscilaciones de amplitud creciente, es la condición
de arranque. Después la amplitud del oscilador se estabiliza cuando la resistencia
equivalente es infinita y en ese caso la frecuencia de oscilación es la frecuencia de
resonancia del circuito LC
DISEÑO ELECTRONICO ANALOGO
223
El oscilador de transistores acoplados analizado en el apartado anterior, puede analizarse
desde esta nueva óptica. Pero como ejemplo de aplicación hemos escogido otro circuito.
Ejemplo Vamos a calcular la impedancia de entrada del circuito representado en la figura
100g (a). Su circuito equivalente para pequeña señal se muestra en la figura 100g (b).
Figura 100g. (a) Circuito de resistencia negativa. (b) Circuito equivalente para pequeña
señal
En el circuito se observa que
luego
Sustituyendo
Resulta
DISEÑO ELECTRONICO ANALOGO
224
El circuito equivalente a la entrada resulta ser una capacidad en serie con una resistencia
negativa. Si añadimos en paralelo con la entrada una bobina obtendremos el circuito RLC
de la figura 100h. La resistencia r es la resistencia parásita asociada a la bobina real.
Aplicando el concepto de oscilador como circuito RLC, deducimos que la oscilación se
estabiliza cuando la resistencia serie total es nula (equivalente a una resistencia paralelo
infinita) a una frecuencia
La condición de arranque es que la resistencia total sea negativa, es decir que
Figura 100h. Circuito RLC que resulta al añadir una bobina en paralelo con el circuito de
la figura 100g.
Naturalmente estos resultados coinciden con los que se obtienen aplicando el criterio de
Barkhausen. El circuito completo, incluyendo la polarización se muestra en la figura 100i.
DISEÑO ELECTRONICO ANALOGO
225
Figura 100i. Circuito oscilador basado en el circuito de la figura 100f incluyendo los
elementos de polarización
OSCILADOR SIMÉTRICO CON COMPUERTAS NOT:
Supongamos que en determinado momento la salida del inversor B está a nivel 1,
entonces su entrada esta a 0, y la entrada del inversor A a nivel 1. En esas
condiciones C se carga a través de R, y los inversores permanecen en ese estado.
Cuando el condensador alcanza su carga máxima, se produce la conmutación del
inversor A. Su entrada pasa a 0, su salida a 1 y la salida del inversor B a 0, se
invierte la polaridad del capacitor y este se descarga, mientras tanto los inversores
permanecen sin cambio, una vez descargado, la entrada del inversor A pasa
nuevamente a 1, y comienza un nuevo ciclo.
Este oscilador es simétrico ya que el tiempo que dura el nivel alto es igual al que
permanece en nivel bajo, este tiempo está dado por T = 2,5 R C
T expresado en segundos, R en Ohms, C en Faradios
Ahora bien, si recordamos las leyes de De Morgan, uniendo las entradas de compuertas
NAND o compuertas NOR se obtiene la misma función que los inversores o compuertas
NOT.
Figura 101. Oscilador Simétrico con compuertas NOT
DISEÑO ELECTRONICO ANALOGO
226
Figura 102. Oscilador Simétrico con compuertas NAND
Figura 103. Oscilador Simétrico con compuertas NOR
DISPARADORES SCHMITT TRIGGER
Las compuertas SCHMITT TRIGGER o disparadores de Schimitt, son iguales a las
compuertas vistas hasta ahora, pero tienen la ventaja de tener umbrales de conmutación
muy definidos llamados VT+ y VT-, esto hace que puedan reconocer señales que en las
compuertas lógicas comunes serían una indeterminación de su estado y llevarlas a
estados lógicos definidos, mucho más definidos que las compuertas comunes que tienen
un solo umbral de conmutación.
Figura 104. Disparador SCHMITT TRIGGER
Si la salida está en un nivel lógico 1, C comienza a cargarse a través de R, a medida que
la tensión crece en la entrada de la compuerta, esta alcanza el nivel VT+ y produce la
conmutación de la compuerta llevando la salida a nivel 0 y el capacitor comienza su
descarga. Cuando el potencial a la entrada de la compuerta disminuye por debajo del
umbral de VT-, se produce nuevamente la conmutación pasando la salida a nivel 1, y se
reinicia el ciclo.
Integrado Frecuencia Valor de R
7414
0.8/RC
R
500W
DISEÑO ELECTRONICO ANALOGO
227
74LS14
0.8/RC
R
2W
74HC14
1.2/RC
R
10MW
Tabla 47. Frecuencia de oscilación según R y C
OSCILADOR DE CRISTAL
El cristal de cuarzo es utilizado como componente de control de la frecuencia de circuitos
osciladores convirtiendo las vibraciones mecánicas en voltajes eléctricos a una frecuencia
específica. Esto ocurre debido al efecto piezoeléctrico. La piezo-electricidad es
electricidad creada por una presión mecánica. En un material piezoeléctrico, al aplicar una
presión mecánica sobre un eje, dará como consecuencia la creación de una carga
eléctrica a lo largo de un eje ubicado en un ángulo recto respecto al de la aplicación de la
presión mecánica. En algunos materiales, se encuentra que aplicando un campo eléctrico
según un eje, produce una deformación mecánica según otro eje ubicado a un ángulo
recto respecto al primero. Por las propiedades mecánicas, eléctricas, y químicas, el
cuarzo es el material más apropiado para fabricar dispositivos con frecuencia bien
controlada.
Figura 105. Ubicación de elementos específicos dentro de una piedra de cuarzo
Frecuencia Fundamental vs. Frecuencia de Sobretono: Esto es de importancia cuando
se especifica un cristal. Cuando se incrementa la frecuencia solicitada, el espesor del
cuerpo del cristal disminuye y por supuesto existe un límite en el proceso de fabricación.
Alrededor de 30MHz, el espesor de la placa del cristal comienza a ser muy delgada.
Debido a que el corte AT (ver figura 105) resonará a números enteros impares múltiplos
de de la frecuencia fundamental, es necesario especificar el orden del sobretono deseado
para cristales de altas frecuencias.
Potencia de trabajo (Drive Level): Es la potencia disipada por el cristal. Está
normalmente especificada en micro o mili vatios, siendo un valor típico 100 micro vatios.
Tolerancia en la frecuencia: La tolerancia en la frecuencia se refiere a la máxima
desviación permitida y se expresa en partes por millón (PPM) para una temperatura
especificada, usualmente 25°C.
DISEÑO ELECTRONICO ANALOGO
228
Estabilidad de la frecuencia: La estabilidad de la frecuencia se refiere a la máxima
desviación en PPM, en un determinado rango de temperatura. La desviación está tomada
con referencia a la frecuencia medida a 25°C.
Envejecimiento: El envejecimiento se refiere a los cambios acumulativos en la frecuencia
del cristal con el transcurrir del tiempo. Los factores que intervienen son: exceso en la
potencia disipada, efectos térmicos, fatiga en los alambres de armado y pérdidas en la
elasticidad del cristal. El diseño de circuitos considerando bajas temperaturas ambientales
y mínimas potencias en el cristal reducirán el envejecimiento.
Circuito Eléctrico Equivalente: El circuito eléctrico equivalente que se muestra a
continuación es un esquema del cristal de cuarzo trabajando a una determinada
frecuencia de resonancia. El condensador Co en paralelo, representa en total la
capacidad entre los electrodos del cristal más la capacidad de la carcasa y sus terminales.
R1, C1 y L1 conforman la rama principal del cristal y se conocen como componentes o
parámetros motional donde:
·
L1 representa la masa vibrante del cristal,
·
C1 representa la elasticidad del cuarzo y
·
R1 representa las pérdidas que ocurren dentro del cristal.
Figura 106. Circuito Eléctrico Equivalente de un cristal de cuarzo
Por ejemplo, un oscilador implementado con dos inversores y un Cristal de cuarzo, el
trimer de 40pf se incluye para un ajuste fino de la frecuencia de oscilación, mientras el
circuito oscilante en si funciona con un solo inversor, se incluye otro para actuar como
etapa separadora.
Figura 107. Oscilador a Cristal
DISEÑO ELECTRONICO ANALOGO
229
OSCILADORES CONTROLADOS
Se trata simplemente de controlar el momento en que estos deben oscilar, tenemos dos
opciones, que sean controlados por un nivel alto o por un nivel bajo.
Se tiene en cuenta que los osciladores vistos hasta el momento solo pueden oscilar
cambiando el estado de sus entradas en forma alternada, lo que haremos será forzar ese
estado a un estado permanente, como dije anteriormente ya sea a 1 o 0.
Figura 106. Osciladores Controlados a Nivel 0
Figura 107. Osciladores Controlados a Nivel 1
CIRCUITO INTEGRADO 555
Este Circuito Integrado (C.I.) es para los experimentadores y aficionados un dispositivo
barato con el cual pueden hacer muchos proyectos. Es un temporizador es tan versátil
que se puede, incluso utilizar para modular una señal en frecuencia modulada (F.M.)
Está constituido por una combinación de comparadores lineales, Flip-Flops (básculas
digitales), transistor de descarga y excitador de salida.
Es muy popular para hacer osciladores que sirven como reloj (base de tiempo) para el
resto del circuito. A continuación se explicara la configuración de sus pines:
DISEÑO ELECTRONICO ANALOGO
230
Figura 108. Representaciones del CI 555
Pin 1 - Tierra o masa
Pin 2 - Disparo: Es en esta patilla, donde se establece el inicio del tiempo de retardo, si el
555 es configurado como monostable. Este proceso de disparo ocurre cuando este pin va
por debajo del nivel de 1/3 del voltaje de alimentación. Este pulso debe ser de corta
duración, pues si se mantiene bajo por mucho tiempo la salida se quedará en alto hasta
que la entrada de disparo pase a alto otra vez.
Pin 3 - Salida: Aquí veremos el resultado de la operación del temporizador, ya sea que
esté conectado como monostable, astable u otro. Cuando la salida es alta, el voltaje será
el voltaje de aplicación (Vcc) menos 1.7 Voltios. Esta salida se puede obligar a estar en
casi 0 voltios con la ayuda de la patilla reset ( Pin 4)
Pin 4 - Reset: Si se pone a un nivel por debajo de 0.7 Voltios, pone la patilla de salida 3 a
nivel bajo. Si por algún motivo esta patilla no se utiliza hay que conectarla a Vcc para
evitar que el 555 se reinicie
Pin 5 - Control de voltaje: Cuando el temporizador se utiliza en el modo de controlador
de voltaje, el voltaje en esta patilla puede variar casi desde Vcc (en la práctica como Vcc-
1 voltio) hasta casi 0 V (aprox. 2 Voltios). Así es posible modificar los tiempos en que la
patilla 3 está en alto o en bajo independiente del diseño (establecido por las resistencias y
condensadores conectados externamente al 555). El voltaje aplicado a la patilla 5 puede
variar entre un 45 y un 90 % de Vcc en la configuración monoestable. Cuando se utiliza la
configuración astable, el voltaje puede variar desde 1.7 voltios hasta Vcc. Modificando el
voltaje en esta patilla en la configuración astable causará la frecuencia original del astable
sea modulada en frecuencia (FM). Si esta patilla no se utiliza, se recomienda ponerle un
condensador de 0.01uF para evitar las interferencias.
Pin 6 - Umbral: Es una entrada a un comparador interno que tiene el 555 y se utiliza
para poner la salida (Pin 3) a nivel bajo.
Pin 7 - Descarga: Utilizado para descargar con efectividad el condensador externo
utilizado por el temporizador para su funcionamiento.
Pin 8 - V+: También llamado Vcc, es el pin donde se conecta el voltaje de alimentación
que va de 4.5 voltios hasta 16 voltios (máximo). Hay versiones militares de este integrado
que llegan hasta 18 Voltios.
El CI 555 se puede conectar para que funcione de diferentes maneras, entre los más
importantes están: como multivibrador astable y como multivibrador monoestable.
DISEÑO ELECTRONICO ANALOGO
231
CI 555 COMO MULTIVIBRADOR ASTABLE:
Este tipo de funcionamiento se caracteriza por una salida con forma de onda cuadrada (o
rectangular) continua de ancho predefinido por el diseñador del circuito. El esquema de
conexión es el que se muestra. La señal de salida tiene un nivel alto por un tiempo T1 y
en un nivel bajo un tiempo T2. Los tiempos de duración dependen de los valores de R1 y
R2.
T1 = 0.693(R1+R2)C1 y T2 = 0.693 x R2 x C1 (en segundos)
Figura 109. CI 555 como Multivibrador Astable
La frecuencia con que la señal de salida oscila está dada por la fórmula:
f = 1 / [0.693 x C1 x (R1 + 2 x R2)]
y el período es simplemente = T = 1 / f
Hay que recordar que el período es el tiempo que dura la señal hasta que ésta se vuelve
a repetir (Tb - Ta), ver figura 109.
CI 555 COMO MULTIVIBRADOR MONOESTABLE:
En este caso el circuito entrega a su salida un solo pulso de un ancho establecido por el
diseñador (tiempo de duración) Ver figura 110.
El esquema de conexión es el que se muestra. La Fórmula para calcular el tiempo de
duración (tiempo que la salida está en nivel alto) es:
T = 1.1 x R1 x C1 (en segundos).
Observar que es necesario que la señal de disparo, sea de nivel bajo y de muy corta
duración en el PIN 2 del C.I. para iniciar la señal de salida.
DISEÑO ELECTRONICO ANALOGO
232
Figura 110. CI 555 como Multivibrador Monoestable
CIRCUITOS MONOESTABLES:
Monoestable sencillo con un inversor: Considere inicialmente la entrada del inversor
en nivel bajo a través de R y C, entonces su salida estará a nivel alto, ahora bien, un 1
lógico de poca duración en la entrada, hace que se cargue el capacitor y conmute el
inversor entregando un 0 lógico en su salida, y este permanecerá en ese estado hasta
que la descarga del capacitor alcance el umbral de histéresis de la compuerta y entonces
conmutará y regresará a su estado inicial (Ver figura 111)
Figura 111. Monoestable sencillo con inversor
Figura 112. Monoestable con dos inversores
DISEÑO ELECTRONICO ANALOGO
233
Figura 113. Monoestable con dos compuertas NOR
DISEÑO ELECTRONICO ANALOGO
234
PRACTICA 14 CIRCUITOS CON AMPLIFICADOR OPERACIONAL
(5 p)1..- Diseña el siguiente circuito para que realice la salida del osciloscopio
Enseña tu diseño por la parte de atrás, móntalo en el taller y compara el valor teórico con el
real
R1=
R2= R+=
Ganancia Teórica
Ganancia real=
Pon la realimentación positiva, ¿Que ocurre?
Comenta el resultado:
(5 puntos)2.- Diseña por ordenador un circuito que realice la siguiente expresión
Vsalida = 2 Va + 3 Vb - Vc
Va, Vb, Vc son tensiones que son de entrada, luego coloca unos valores arbitrarios Va que
sea tensión alterna y Vb, Vc continua, imprime el circuito con sus formas de onda
Imprime el circuito propuesto en EWB
(5puntos) 3.- Realiza por ordenador un filtro pasa banda desde 100Hz hasta 10 Khz, enseña
el diseño y la impresión del circuito con el diagrama de Bode.Ganancia 32 dB.
Imprime el circuito propuesto en EWB
DISEÑO ELECTRONICO ANALOGO
235
PRÁCTICA 15 ASTABLE Y MONOESTABLE CON 555
(Esta práctica pertenece a Analógica, no la cambies de sitio, aunque a lo mejor la teoria la
has dado ya en digital)
1..- Diseña el siguiente circuito para que realice la salida del osciloscopio
Para visualizarlo, en vez de 0.2mseg, que sean 0.2seg, cuenta por ejemplo 10 pulsos y
así determina la duración de un pulso..
2.-Enseña tu diseño por la parte de atrás, móntalo en el taller y compara el valor teórico
con el real, rellena estos valores:
R1=
R2=
C=
Rellena esta tabla:
CALCULADOS
MEDIDOS
ORDENADOR
Th y Tl
3
T total
3.- Realiza por ordenador y en el taller un monoestable con un tiempo de duración de 2
seg, observa su funcionamiento, imprime las formas de onda ,el circuito y enseña el
diseño en la hoja de atrás
4.-Comenta el resultado de estos circuitos, monoestable y astable:
3
Quizás no puedas diferenciar la parte alta de la parte baja en el taller, así que esta casilla no la rellenes, sólo
la del tiempo total contando varios impulsos.
DISEÑO ELECTRONICO ANALOGO
236
PRACTICA 16 MULTIVIBRADOR ASTABLE
1.- Monta en el taller el circuito siguiente :
2.- Realiza las medidas siguientes
TH
medido
TL
medido
TH
calculado
TL
calculado
Vce Q1
Vce Q2 Vbe
3.- Calcula los valores de R1 y R2 para que el Tiempo alto sea 2 veces más grande que el
del diseño anterior y el tiempo bajo la mitad, enseña aquí los cálculos, móntalo en el taller
y en el ordenador, imprímelo.
4.- Conclusiones y utilidades que se te ocurren en estos circuitos.
DISEÑO ELECTRONICO ANALOGO
237
BIBLIOGRAFIA
BOYLESTAD, Robert L. NASHELSKY, Lois. Teoría de Circuitos y Dispositivos Electrónicos.
Octava Edición. Pearson Prentice Hall. 2003. ISSBN 970-260436-2.
MALONEY, Timothy J. Electronica Industrial Moderna. Quinta Edición. Pearson Educación.
Monroe Country Comunita Collage. 2006 ISBN: 970-26-0669-1
CARDENAS Espinosa, Rubén Darío. Design Electronic Digital. Primera Edición. Universidad de
Caldas. 2008.
RUIZ Robredo, Guatavo A. Electrónica Básica para Ingenieros. ISBN 84-607-1933-2. Editor el
Autor. Junio 2001. Universidad de Cantabria España.
Analysis and application of analog electronic circuits to biomedical instrumentation
http://www.engnetbase.com/ejournals/books/book%5Fsummary/summary.asp?id=4725
http://www.netLibrary.com/urlapi.asp?action=summaryv=1bookid=110940
https://www.lib.umn.edu/slog.phtml?url=http://www.engnetbase.com/ejournals/books/book%5Fkm.
asp?id=4725
User interface design for electronic appliances
http://www.contentreserve.com/TitleInfo.asp?ID={00AB336C-C8FA-4441-ACE0-
B41DE57F970F}Format=50
http://www.contentreserve.com/TitleInfo.asp?ID={ABBFFCD1-6547-4567-BB88-
29F12EA9A34D}Format=50
Baumann, Konrad,; Thomas, Bruce, Publicaci#243;n: London ; New York : Taylor
Francis, 2001 Documento: Ingl#233;s (eng)
Fundamentals
of
industrial
instrumentation
and
process
control
http://www.netLibrary.com/urlapi.asp?action=summaryv=1bookid=136189 Autor: Dunn,
William 1932- Publicación: New York : McGraw-Hill, 2005 Documento: Inglés (eng) : Recurso en
Internet Archivo de computadora Bibliotecas de todo el mundo: 177 (WorldCat) 2004 Document:
English
http://www.virtual.unal.edu.co/cursos/
http://www.zona-warez.com/tutoriales-ingenieria_electrica.html
DISEÑO ELECTRONICO ANALOGO
238
APENDICE 1: EL CONDENSADOR
Figura 1: Diversos tipos de condensadores
En electricidad y electrónica, un condensador, a veces denominado incorrectamente con el
anglicismo capacitor, es un dispositivo formado por dos conductores o armaduras, generalmente en
forma de placas o láminas, separados por un material dieléctrico, que sometidos a una diferencia de
potencial (d.d.p.) adquieren una determinada carga eléctrica.
A esta propiedad de almacenamiento de carga se le denomina capacidad, y en el Sistema
internacional de unidades se mide en Faradios (F), siendo 1 faradio la capacidad de un condensador
en el que, sometidas sus armaduras a una d.d.p. de 1 voltio, éstas adquieren una carga eléctrica de 1
culombio.
La capacidad de 1 faradio es mucho más grande que la de la mayoría de los condensadores, por lo
que en la práctica se suele indicar la capacidad en µF = 10
-6
, nanoF = 10
-9
o picoF = 10
-12
faradios.
Los condensadores obtenidos a partir de supercondensadores (EDLC) son la excepción. Están
hechos de carbón activado para conseguir una gran área relativa y tienen una separación molecular
entre las placas. Así se consiguen capacidades del orden de cientos o miles de faradios. Uno de
estos condensadores se incorpora en el reloj Kinetic de Seiko, con una capacidad de 1/3 de Faradio,
haciendo innecesaria la pila. También se está utilizando en los prototipos de automóviles eléctricos.
El valor de la capacidad viene definido por la fórmula siguiente:
En donde:
C: Capacitancia
Q: Carga eléctrica
V: Diferencia de potencial
En cuanto al aspecto constructivo, tanto la forma de las placas o armaduras, como la naturaleza del
material dieléctrico es sumamente variable. Así tenemos condensadores formados por placas,
usualmente de aluminio, separadas por aire, materiales cerámicos, mica, poliéster, papel o por una
capa de óxido de aluminio obtenido por medio de la electrolisis.
Energía almacenada:
El condensador almacena energía eléctrica en forma de campo eléctrico cuando aumenta la
diferencia de potencial (d.d.p.) en sus terminales, devolviéndola cuando ésta disminuye.
DISEÑO ELECTRONICO ANALOGO
239
Matemáticamente se puede obtener que la energía,
, almacenada por un condensador con
capacidad C, que es conectado a una d.d.p. V, viene dada por:
Este hecho es aprovechado para la fabricación de memorias, en las que se aprovecha el condensador
que aparece entre la puerta y el canal de los transistores MOS para ahorrar componentes.
Comportamientos ideal y real
Figura 2: Circuito con condensador.
El condensador ideal (figura 2) puede definirse a partir de la siguiente ecuación diferencial:
Donde, C es la capacidad, u(t) es la función diferencia de potencial aplicada a sus bornes e i(t) la
intensidad resultante que circula.
DISEÑO ELECTRONICO ANALOGO
240
Comportamiento en corriente continua:
Un condensador real en CC se comporta prácticamente como uno ideal, esto es, como un circuito
abierto. Esto es así en régimen permanente ya que en régimen transitorio, esto es, al conectar o
desconectar un circuito con condensador, suceden fenómenos eléctricos que inciden sobre la d.d.p.
en sus bornes.
Comportamiento en corriente alterna:
En CA, un condensador ideal ofrece una resistencia al paso de la corriente que recibe el nombre de
reactancia capacitiva, XC, cuyo valor viene dado por la inversa del producto de la pulsación
(
) por la capacidad, C:
Si la pulsación está en radianes por segundo (rad/s) y la capacidad en faradios (F) la reactancia
resultará en ohmios.
Figura 3. Diagrama cartesiano de las tensiones y corriente en un condensador.
Al conectar una CA senoidal v(t) a un condensador circulará una corriente i(t), también senoidal,
que lo cargará, originando en sus bornes una caída de tensión, -v
c
(t), cuyo valor absoluto puede
demostrase que es igual al de v(t). Al decir que por el condensador circula una corriente, se debe
puntualizar que, en realidad, dicha corriente nunca atraviesa su dieléctrico. Lo que sucede es que el
DISEÑO ELECTRONICO ANALOGO
241
condensador se carga y descarga al ritmo de la frecuencia de v(t), por lo que la corriente circula
externamente entre sus armaduras.
Figura 4. Diagrama fasorial.
El fenómeno físico del comportamiento del condensador en CA podemos observarlo en la figura 3.
Entre los 0º y los 90º i(t) va disminuyendo desde su valor máximo positivo a medida que aumenta
su tensión de carga v
c
(t), llegando a ser nula cuando alcanza el valor máximo negativo a los 90º,
puesto que la suma de tensiones es cero (v
c
(t)+ v(t) = 0) en ese momento. Entre los 90º y los 180º
v(t) disminuye, y el condensador comienza a descargarse, disminuyendo por lo tanto v
c
(t). En los
180º el condensador está completamente descargado, alcanzando i(t) su valor máximo negativo. De
los 180º a los 360º el el razonamiento es similar al anterior.
De todo lo anterior se deduce que la corriente queda adelantada 90º respecto de la tensión aplicada.
Consideremos por lo tanto, un condensador C, como el de la figura 2, al que se aplica una tensión
alterna de valor:
De acuerdo con la ley de Ohm circulará una corriente alterna, adelanto 90º ( / 2) respecto a la
tensión aplicada (figura 4), de valor:
donde
. Si se representa el valor eficaz de la corriente obtenida en forma polar:
DISEÑO ELECTRONICO ANALOGO
242
Figura 5. Circuitos equivalentes de un condensador en CA.
Y operando matemáticamente:
Por lo tanto, en los circuitos de CA, un condensador ideal se puede asimilar a una magnitud
compleja sin parte real y parte imaginaria negativa:
En el condensador real, habrá que tener en cuenta la resistencia de pérdidas de su dieléctrico, R
C
,
pudiendo ser su circuito equivalente, o modelo, el que aparece en la figura 5a) o 5c) dependiendo
del tipo de condensador y de la frecuencia a la que se trabaje, aunque para análisis más precisos
pueden utilizarse modelos más complejos que los anteriores.
Asociaciones de condensadores
Figura 4: Asociación serie general.
Figura 5: Asociación paralelo general.
Al igual que la resistencias, los condensadores pueden asociarse en serie (figura 4), paralelo (figura
5) o de forma mixta. En estos casos, la capacidad equivalente resulta ser par a la asociación
paralelo:
DISEÑO ELECTRONICO ANALOGO
243
Y para la serie:
Para la asociación mixta se procederá de forma análoga que con las resistencias.
Aplicaciones típicas
Los condensadores suelen usarse para:
·
Baterías, por su cualidad de almacenar energía
·
Memorias, por la misma cualidad
·
Filtros
·
Adaptación de impedancias, haciéndoles resonar a una frecuencia dada con otros
componentes
·
Demodular AM, junto con un diodo
Condensadores variables
Un condensador variable es aquel en el cual se pueda cambiar el valor de su capacidad. En el caso
de un condensador plano, la capacidad puede expresarse por la siguiente ecuación:
Donde:
0
: constante dieléctrica del vacío
r
: constante dieléctrica o permitividad relativa del material dieléctrico entre las placas
A: el área efectiva de las placas
d: distancia entre las placas o espesor del dieléctrico
Para tener un condensador variable hay que hacer que por lo menos una de las tres últimas
expresiones cambie de valor. De este modo, se puede tener un condensador en el que una de las
placas sea móvil, por lo tanto varía d y la capacidad dependerá de ese desplazamiento, lo cual
podría ser utilizado, por ejemplo, como sensor de desplazamiento. Otro tipo de condensador
variable se presenta en los diodos varicap.
DISEÑO ELECTRONICO ANALOGO
244
APENDICE 2 EL INDUCTOR
Figura 1: Inductores.
Un inductor o bobina es un componente pasivo de un circuito eléctrico que, debido al fenómeno
de la autoinducción, almacena energía en forma de campo magnético.
Construcción:
Un inductor está constituido usualmente por una bobina de material conductor, típicamente cable de
cobre. Existen inductores con núcleo de aire o con núcleo de un material ferroso, para incrementar
su inductancia.
Los inductores pueden también estar construidos en circuitos integrados, usando el mismo proceso
utilizado para realizar microprocesadores. En estos casos se usa, comúnmente, el aluminio como
material conductor. Sin embargo, es raro que se construyan inductores dentro de los circuitos
integrados; es mucho más práctico usar un circuito llamado girador que, mediante un
amplificador operacional, hace que un condensador se comporte como si fuese un inductor.
También pueden fabricarse pequeños inductores, que se usan para frecuencias muy altas, con un
conductor pasando a través de un cilindro de ferrita o granulado.
Energía almacenada:
La bobina almacena energía eléctrica en forma de campo magnético cuando aumenta la intensidad
de corriente, devolviéndola cuando ésta disminuye. Matemáticamente se puede demostrar que la
energía,
, almacenada por una bobina con inductacia L, que es recorrida por una corriente de
intensidad I, viene dada por:
Fuerza electromotriz autoinducida:
Una variación de la intensidad de corriente (
) dará como resultado una
variación del campo magnético y, por lo mismo, un cambio en el flujo que está atravesando el
circuito. De acuerdo con la Ley de Faraday, un cambio del flujo, origina una fuerza electromotriz
DISEÑO ELECTRONICO ANALOGO
245
autoinducida. Esta fuerza electromotriz, de acuerdo con la Ley de Lenz (la corriente inducida se
opone en cada instante a las variaciones de la corriente inductora. Cuando esta aumenta, la corriente
inducida circula en el sentido opuesto. Y cuando la corriente inductora disminuye, la corriente
inducida circula en el mismo sentido. Los fenómenos de inducción obedecen según esto a una ley
muy general de la naturaleza: la de la acción y de la reacción. La corriente inducida depende de la
velocidad de variación de la corriente inductora así como de su intensidad), se opondrá a la causa
que lo origina, esto es, la variación de la corriente eléctrica, por ello suele recibir el nombre de
fuerza contralectromotriz. Su valor viene dado por la siguiente ecuación diferencial:
Donde el signo menos indica que se opone a la causa que lo origina.
Comportamientos ideal y real
Figura 2: Circuito con inductancia.
La bobina ideal (figura 2) puede definirse a partir de la siguiente ecuación:
Donde, L es la inductancia, u(t) es la función diferencia de potencial aplicada a sus bornes e i(t) la
intensidad resultante que circula.
DISEÑO ELECTRONICO ANALOGO
246
Comportamiento en corriente continua
Figura 3. Diagrama cartesiano de las tensiones y corriente en una bobina.
Una bobina ideal en CC se comporta como un cortocircuito (conductor ideal) mientras que la real se
comporta como una resistencia cuyo valor R
L
(figura 3) será el de su devanado. Esto es así en
régimen permanente ya que en régimen transitorio, esto es, al conectar o desconectar un circuito con
bobina, suceden fenémenos electromagnéticos que inciden sobre la corriente.
Comportamiento en corriente alterna
Figura 4. Diagrama fasorial.
En CA, una bobina ideal ofrece una resistencia al paso de la corriente que recibe el nombre de
reactancia inductiva, X
L
, cuyo valor viene dado por el producto de la pulsación (
) por
la inductacia, L:
DISEÑO ELECTRONICO ANALOGO
247
Si la pulsación está en radianes por segundo (rad/s) y la inductancia en henrios (H) la reactancia
resultará en ohmios.
Al conectar una CA senoidal v(t) a una bobina aparecerá una corriente i(t), también senoidal, esto
es, variable, por lo que, como se comentó más arriba, aparecerá una fuerza contraelectromotriz, -
e(t), cuyo valor absoluto puede demostrase que es igual al de v(t). Por tanto, cuando la corriente i(t)
aumenta, e(t) disminuye para dificultar dicho aumento; análogamente, cuando i(t) disminuye, e(t)
aumenta para oponerse a dicha disminución.
Esto puede apreciarse en el diagrama de la figura 3. Entre 0º y 90º la curva i(t) es negativa,
disminuyendo desde su valor máximo negativo hasta cero, observándose que e(t) va aumentando
hasta alcanzar su máximo negativo.
Entre 90º y 180º, la corriente aumenta desde cero hasta su valor máximo positivo, mientras e(t)
disminuye hasta ser cero. Desde 180º hasta los 360º el razonamiento es similar al anterior.
Dado que la tensión aplicada, v(t)es igual a -e(t), o lo que es lo mismo, está desfasada 180º respecto
de e(t), resulta que la corriente i(t) queda retrasada 90º respecto de la tensión aplicada.
Consideremos por lo tanto, una bobina L, como la de la figura 2, a la que se aplica una tensión
alterna de valor:
Figura 5.: Circuitos equivalentes de una bobina real en CC, a), y en CA, b) y c).
De acuerdo con la ley de Ohm circulará una corriente alterna, retrasada 90º ( / 2) respecto a la
tensión aplicada (figura 4), de valor:
DISEÑO ELECTRONICO ANALOGO
248
Donde
. Si se representa el valor eficaz de la corriente obtenida en forma polar:
Y operando matemáticamente:
Por lo tanto, en los circuitos de CA, una bobina ideal se puede asimilar a una magnitud compleja sin
parte real y parte imaginaria positiva:
En la bobina real, habrá que tener en cuenta la resistencia de su bobinado, R
L
, pudiendo ser su
circuito equivalente o modelo, el que aparece en la figura 5b) o 5c) dependiendo del tipo de bobina
o frecuencia de funcionamiento, aunque para análisis más precisos pueden utilizarse modelos más
complejos que los anteriores.
Asociaciones comunes
Figura 6. Asociación serie general.
Figura 7. Asociación paralelo general.
Al igual que la resistencias, las bobinas pueden asociarse en serie (figura 6), paralelo (figura 7) o de
forma mixta. En estos casos, y siempre que no exista acoplamiento magnético, la inductancia
equivalente para la asociación serie vendrá dada por:
DISEÑO ELECTRONICO ANALOGO
249
y para la paralelo:
Para la asociación mixta se procederá de forma análoga que con las resistencias.
DISEÑO ELECTRONICO ANALOGO
250
APENDICE 3 IMPEDANCIA
Impedancia de un circuito serie
La oposición a la circulación de corriente en un circuito serie de CA que contiene resistencia,
inductancia y capacidad, se llama impedancia (Z). Impedancia es el vector suma de la reactancia
neta y de la resistencia total en el circuito. Dado que la corriente en una inductancia atrasa al voltaje
aplicado en 90°, mientras que la corriente en una capacidad está adelantada respecto del voltaje
aplicado en 90°, las reactancias inductiva y capacitiva están 180° fuera de fase. La reactancia neta
es el vector suma de la reactancia inductiva (XL) y de la reactancia capacitiva (XC), y es
numéricamente igual a la diferencia aritmética entre XL, y XC:
Si la reactancia inductiva es numéricamente mayor que la capacitiva, la reactancia neta es positiva
(+) y la corriente estará atrasada respecto al voltaje aplicado, como en una inductancia (ver Fig. 3-6
A). Si la reactancia capacitiva es numéricamente mayor que la inductiva, la reactancia neta es
negativa (-) , y la corriente adelanta al voltaje aplicado como en la capacidad.
Dado que la corriente en una resistencia está en fase con el voltaje aplicado, mientras que en una
reactancia, adelanta o atrasa al voltaje aplicado (dependiendo de que el signo sea + o -) , las
componentes resistivas y reactivas no se pueden sumar directamente para obtener la impedancia,
sino que deben ser sumadas vectorialmente. Si la resistencia total (R) y la reactancia neta ( X =XL -
XC) representan dos lados de un triángulo rectángulo, el vector suma de R y X -o sea la impedancia
Z- es simplemente la hipotenusa del triángulo, como se muestra en Fig. 3-6 (B).
Figura A1. Reactancia neta (A) e impedancia (B) en circuito serie de CA.
Dado que de acuerdo con el conocido teorema de Pitágoras, la hipotenusa es igual a la suma de
los cuadrados de los dos catetos, la magnitud de la impedancia está dada por:
DISEÑO ELECTRONICO ANALOGO
251
El ángulo formado por los vectores de la impedancia (Z) y la resistencia (R), se llama ángulo de
fase () y está dado por
Como puede demostrarse, es el ángulo que atrasa o adelanta a la corriente respecto del voltaje
aplicado en el circuito serie de CA.
Resolución del circuito serie de CA
Una forma modificada de la ley de Ohm permite resolver el circuito serie de corriente alterna en
forma similar al de corriente continua. Si se establece que el valor del voltaje aplicado es el
efectivo (rms), entonces, la magnitud de la corriente efectiva (I) es simplemente el voltaje
aplicado (E) dividido por la magnitud de la impedancia (Z) o
Similarmente, la magnitud de la impedancia.
Y la caída de voltaje sobre una impedancia (Z) es
El ángulo de fase por el cual la corriente adelanta o atrasa al voltaje aplicado, es igual al
ángulo () entre la resistencia y la impedancia en el triángulo de impedancias (Fig. 3-6 B) y está
dado más arriba.
DISEÑO ELECTRONICO ANALOGO
252
Como una prueba del cálculo, el vector suma de las caídas de voltaje sobre la resistencia (ER),
inductancia (EL) y capacidad (EC), debe ser igual al voltaje aplicado E, en el circuito serie. Si
las caídas de voltaje resistivas y reactivas, representan los lados de un triángulo rectángulo,
entonces el voltaje aplicado
Además, dado que las caídas de voltaje son proporcionales a la resistencia y a la reactancia
respectivamente, el ángulo de fase entre la corriente y el voltaje,
DISEÑO ELECTRONICO ANALOGO
253
APENDICE 4 SEÑALES ELECTRICAS
FUNCION ESCALON UNITARIO
Figura 1.1: Función Escalón Unitario
La función escalón unitario es una función matemática que tiene como característica, el tener un valor de
0 para todos los valores negativos de su argumento y de 1 para todos los valores positivos de su
argumento, expresado en forma matemáticamente seria de la forma
u(t) =
0 si t 0
1 si t 0
Para t = 0 se tiene que el proceso ocurre instantáneamente, puesto que el argumento de u(t) es el tiempo t,
que cambia de un valor negativo a uno positivo.
Esta función normalmente se utiliza para presentar variables que se interrumpen en algún instante de
tiempo, para esto se multiplica la función escalón unitario, por la función que define la variable en el
tiempo como se muestra a continuación.
En la siguiente figura 1.2 se tiene la gráfica de una función f(t) definida como: f(t) = 1 t/4
Si se toma esta función y se multiplica por la función escalón unitario u(t),
DISEÑO ELECTRONICO ANALOGO
254
Figura 1.2: Función f(t)
Se obtiene la siguiente gráfica:
Figura 1.3: Función f(t) . u(t)
Como se puede observar la función f(t) ¢ u(t) inicia en cero y continua en adelante con los mismos
valores de f(t), esto sería la representación de un interruptor que se encuentra abierto y en un tiempo t = 0,
se cierra y la señal que se observa a partir de este momento tiene como valor f(t).
f(t) . u(t) =
0 si t 0
f(t) si t 0
Aunque esta señal es muy útil, en algunos casos no se desea que la señal inicie exactamente en t = 0, sino
que inicie antes o después como se demuestra en la figura 1.4:
DISEÑO ELECTRONICO ANALOGO
255
Figura 1.4: Señales con desplazamiento
En las dos imágenes anteriores se realizó un corrimiento sobre el eje del tiempo, en una se hizo hacia la
izquierda y en otra hacia la derecha en ambos casos se vario la forma de u(t), es así, que para realizar el
corrimiento hacia la izquierda se cambio la función u(t) por u(t + 1), logrando un corrimiento hacia la
izquierda de 1, dando como resultado que la función f(t) no inicie en t = 0, sino que inicie en t = -1,si se
desea que el valor de t para que inicie la función f(t) sea por ejemplo:
t = -5, solo se debe variar u(t) a u(t + 5) y multiplicarlo por f(t); así mismo, para realizar el corrimiento
hacia la derecha de la función f(t) . u(t) se debe variar u(t), en este caso se resta el valor en cual se quiere
que la función u(t) cambie de estado.
Debido a lo anterior se puede definir de una manera más general la función escalón unitario, así:
u(t - t0) =
0 si t t0
1 si t t0
Como se puede observar cuando t0 = 0, se tiene como resultado la definición dada anteriormente.
Otra utilización de la función escalón unitario es la de formar funciones de pulsos o tipo puerta, como la
que se muestra a continuación, ver figura 1.5:
Figura 1.5: Funciones de Pulsos
DISEÑO ELECTRONICO ANALOGO
256
En esta imagen se muestra la grafica de una función que tiene el valor de f(t) en los valores de t
comprendidos entre 1y -1, y siendo 0 para cualquier otro valor de t, para definir esta función se puede
utilizar cualquiera de las siguientes expresiones:
f(t) . (u(t + 1) - u(t - 1))
f(t) . u(t + 1) . u(t - 1)
Aunque ambas funciones dan como resultado la gráfica mostrada anteriormente, en la primera se utiliza la
suma de funciones escalón unitario, mientras que en la segunda, se utiliza la multiplicación de funciones
escalón unitario.
Este tipo de función comúnmente se llama función puerta de f(t).
En forma general se tendría, la siguiente expresión para realizar una función puerta, fpuerta(t), donde se
conectaría en un tiempo t1 y se desconectaría en un tiempo t2
fpuerta(t) = f(t) .(u(t - t1) - u(t - t2))
fpuerta(t) = f(t) . (u(t1 - t) - u(t2 - t)),
para t1 t2
Existen otras muchas funciones que se pueden expresar utilizando la suma o la multiplicación de
funciones escalón unitario, es también lógico que f(t), puede ser cualquier tipo de función que varíe en el
tiempo, ya sea una expresión matemática, una variable estadística, etc.
LA FUNCION EXPONENCIAL
En Ingeniería Eléctrica, Física y otras ciencias existe una señal que se repite con frecuencia y se obtiene
elevando el número e, base para los logaritmos naturales, a una potencia negativa proporcional al tiempo,
esto es:
f(t) = A . e-at
En la mayoría de programas (como el que se utiliza para realizar las gráficas mostradas en este curso) y
calculadoras esta función se expresa como:
f(t) = A . exp(-at)
El valor de la potencia de un número real con la potencia igual a cero es de 1, por lo tanto el valor de esta
función cuando pasa por t = 0 es de A, en el caso específico de la imagen el valor de A = 1,
f(0) = A . e0 = A
Y para cualquier número con argumento positivo es menor que A, si A = 1,5. Entonces la gráfica de la
función exponencial seria de la siguiente forma, ver figura 1.7:
DISEÑO ELECTRONICO ANALOGO
257
Como se puede observar el valor de la señal en t = 0 es de1,5.
El valor de la constante A en el exponente modifica la función exponencial, cuando este valor es mayor
de 1, la curva se acerca más rápidamente a su asíntota horizontal, en cero, y cuando este valor es menor
que 1, la función varia más lentamente. Esto se puede observar en las siguientes figuras
Figura 1.6: Función Exponencial
Figura 1.7: Función Exponencial Escalada
Un valor altamente utilizado, es el valor de t necesario para que el exponente sea igual a t = -1, este valor
es comúnmente denominado constante de tiempo y se simboliza por la letra .
f(0) = A . e0 = A
La importancia del valor de la constante de tiempo es que en t = , es igual al tiempo necesario para que la
señal decaiga a cero, si decayese con una rapidez constante igual al decaimiento que tiene al pasar por
cero, en otras palabras, es la intersección de la recta tangente a la función exponencial en t = 0, con el eje
del tiempo.
DISEÑO ELECTRONICO ANALOGO
258
También expresa que la señal ha bajado hasta el 36,8% del valor que tenía en t = 0 esto se observa
evaluando la función exponencial para t = .
Si se evalúa f(t) para t = 2 ; t = 3 ; t = 4; etc. Se observa que cuando el valor se encuentra alrededor de
t = 5 , el valor de la señal es un valor despreciable, es menor del 1% de la señal en t = 0. La señal casi ha
desaparecido.
Figura 1.8: Función Exponencial Modificada
FUNCION SENOIDAL O SINUSIODAL
Una de las forma es la más corriente en que se encuentra las señales eléctricas, es la forma senoidal,
comúnmente utilizada en la generación y transmisión de energía eléctrica.
Figura 1.9: Función Senoidal
Esta señal puede ser representada por cualquiera de las funciones trigonométricas, seno o coseno de la
siguiente manera:
f(t) = A . sin (wt + )
DISEÑO ELECTRONICO ANALOGO
259
f(t) = A . cos (wt + )
Los valores de A,w y son respectivamente la amplitud, la frecuencia angular y el ángulo de fase, todas
las funciones sinusoidales son idénticas en forma y solo pueden ser diferenciadas por cambios de
magnitud en cualquiera de estas tres variables.
AMPLITUD: La amplitud de las funciones seno y coseno varían entre 1 y -1, al ser multiplicada la
función por A, f(t) = A * sin (t) o f(t) = A * cos (t), la amplitud de f(t) varía entre A y - A, siendo estos
sus valores máximo y mínimo respectivamente.
En la imagen se muestran dos señales, la señal en rojo tiene como valor de amplitud, A = 1 y la señal en
azul tiene como valor de amplitud A = 1,5, como se puede observar las dos interceptan el eje del tiempo
en el mismo punto y encuentran los valores de máximos y mínimos en los mismos valores de t.
Figura 1.10: Amplitud Función Sinuodal
FRECUENCIA ANGULAR: El argumento de cualquier función trigonométrica debe estar dado en
radianes, por lo tanto wt y deben estar en radianes, como t se encuentra en segundos, entonces w debe
estar en radianes por segundo, por esto también recibe el nombre de velocidad angular.
Se sabe que el período T de una función sinusoidal, es el tiempo que demora en pasar de 0 a 2, por lo
tanto la onda se repite cada 2 radianes. Una onda seno con periodo T debe completar 1=T periodos cada
segundo. Por lo tanto su frecuencia f es 1/T y está dada en hertz (Hz).
f =1/T
Y como wT = 2
DISEÑO ELECTRONICO ANALOGO
260
wT = 2f
Figura 1.11: Frecuencia Angular
Como se puede observar en la imagen al aumentar el valor de w, aumentamos la frecuencia f y
disminuimos el período T.
ANGULO DE FASE: Se tiene en la imagen dos señales donde la única diferencia se encuentra en el
ángulo de fase, si se toma la línea azul como la señal original decimos que la señal roja esta desplazada Á
radianes, normalmente se dice que se encuentra adelantada cuando el valor de es positivo y atrasada si
el valor de es negativo.
Por ser el periodo de la señal T = 2, es lógico pensar que el ángulo de fase se encuentra entre 0 2,
se dice que las sinusoides se encuentran en fase cuando sus ángulos de fase son iguales, en caso
contrario se encuentran fuera de fase o desfasadas.
Figura 1.12: Angulo de fase
Final del extracto de 260 páginas
- Citar trabajo
- Ruben Dario Cardenas Espinosa (Autor), 2009, Diseño Electrónico Análogo. Electrónica básica, Múnich, GRIN Verlag, https://www.grin.com/document/368295
Textos similares


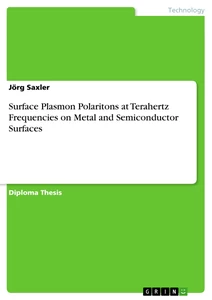
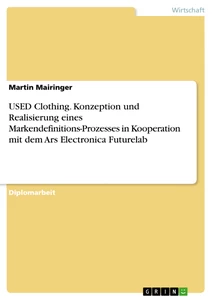
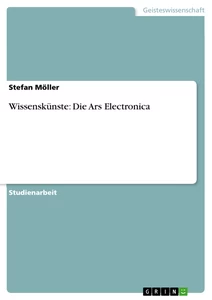

Así es como funciona
✕
Extracto de
260
Páginas

Comentarios