Extracto
2
1. Introducción
Debido a la tolerancia, el envejecimiento, la temperatura y otros factores, el valor de los
componentes de un filtro activo dista del valor exacto necesario para brindar determinada
respuesta; como resultado, la verdadera respuesta de un filtro se desvía de la que tendría si
empleara componentes exactos todo el tiempo. Como una forma de predecir tal desviación los
ingenieros utilizan el concepto de sensibilidad, siendo una figura de mérito de cada
configuración de circuito utilizada como elemento de comparación entre distintas redes a la hora
de seleccionar la más adecuada para un fin determinado, o para saber qué componentes deben
seleccionarse con mejor calidad pues influyen más en el desempeño esperado.
Los estudios de la sensibilidad están muy vinculados a los análisis de tolerancia en los filtros
eléctricos. Estos estudios tomaron auge durante los años setenta y ochenta del siglo XX pero en
ese entonces no se disponía de las modernas herramientas computacionales actuales, las cuales
han hecho retomar el tema con nuevos enfoques y posibilidades, principalmente los que ofrecen
los métodos simbólicos de programación que comienzan a ganar popularidad en la primera
década del siglo XXI.
Consumar el diseño de un filtro incluye garantizar, con mínimo costo de producción, todas sus
respuestas, tanto de frecuencias como transitorias. Debe tenerse en cuenta que después de
escoger la configuración apropiada para el circuito del filtro, lo antes mencionado está muy
estrechamente relacionado con el precio de los componentes en el mercado, pues se fabrican con
un valor de venta medio para su principal parámetro (ej. resistencia o capacitancia) y cierta
tolerancia. Menor tolerancia requiere mayor seguridad tecnológica durante su producción, lo cual
involucra incremento en el costo del componente y viceversa.
Dado que el diseño ingenieril debe procurar la utilización de componentes tan económicos como
se pueda sin comprometer el desempeño del circuito, ello obliga a decidir cuáles componentes
son críticos y cuán baja es la tolerancia que estos requieren. Tal decisión es posible solo a través
de un riguroso análisis de sensibilidad acompañado de análisis de tolerancia. En consecuencia, el
problema relacionado con sensibilidades y tolerancias se convierte necesario en el desarrollo de
filtros activos, principalmente si estos serán producidos masivamente en serie. Así las cosas, solo
los componentes críticos serán de alta calidad y costosos, mientras que para los no críticos
pueden destinarse los menos costosos y de mayor tolerancia. De esta manera se minimiza el
costo al tiempo que se evita un desempeño inesperado del filtro.
Adoptar una posición filosóficamente opuesta, en la que se acepte que los componentes puedan
tener cualquier tolerancia y entonces traten de encontrar configuraciones de circuitos que sean lo
más insensibles posible a las variación de los componentes no ha llevado hasta ahora a resultados
aceptables. Es cierto que existen configuraciones para filtros activos de muy baja sensibilidad, e
incluso insensibles, pero generalmente un satisfactorio grado de insensibilidad a la tolerancia de
los componentes se paga con un incremento de la dispersión en los valores requeridos para una
realización; esto es por ejemplo, una gran relación entre los resistores de mayor y menor valor
que se necesitan para implementar el filtro en cuestión cuando se parte de asumir a voluntad del
3
diseñador los valores de los capacitores. En tales casos no puede pensarse en un escalamiento en
impedancias para elevar el valor del resistor más bajo, pues también se incrementa el de valor
más alto y existe un límite en la resistencia de los resistores comerciales. Por tal motivo, en
aquellas ramas del circuito del filtro con muy baja resistencia se producirán corrientes elevadas
que incrementan la generación de calor y con ello el ruido (ruido térmico o de Johnson), además
esas corrientes son demandadas a los amplificadores operacionales, mientras que en las ramas
con resistores que superan varios M
suelen aparecer capacitancias parásitas que alteran las
constantes de tiempo del filtro, junto al hecho de que la potencia del voltaje de ruido producido
por un resistor se incrementa cuadráticamente con su resistencia.
Como ejemplo de lo mencionado puede citarse el método de realización denominado
estrechamiento de impedancia (impedance tapering) popularizado a partir de los trabajos de
Jurisic, Moschytz, and Mijat (2001), Jurisic, Moschytz, and Mijat (2002) y Jurisic and Mijat
(2005). En este método se llegan a dispersiones para los capacitores con relación 4:1, mientras
que para los resistores estas van desde 4:1 hasta 100:1. Al respecto, el trabajo de Moschytz
(1999) donde se introdujo el concepto de impedance tapering había demostrado que mientras
mayor sea el factor de estrechamiento (
), menor será la sensibilidad del circuito a la tolerancia
de los componentes, pero es precisamente el factor
quien determina la relación entre los
valores de los componentes y por tanto, la dispersión.
Generalmente el análisis de la sensibilidad y la tolerancia es un trabajo arduo y no está exento de
errores numéricos o incorrecta interpretación de los resultados. Una alternativa muy utilizada por
muchas herramientas para la simulación y análisis de circuitos (ej. PSpice, Tina-TI, etc) ha sido
el análisis de Monte Carlo basado en hacer variar aleatoriamente los valores de todos los
componentes del circuito dentro de su rango de tolerancia y para cada combinación de valores,
determinar una versión de la respuesta en estudio. No obstante, con el advenimiento de
herramientas computacionales como el Matlab simbólico puede sistematizarse la realización de
estos análisis evitando posibles errores y facilitando el trabajo, lo cual permite reservar el mayor
esfuerzo a la interpretación de los resultados.
2. La alternativa simbólica
Los métodos simbólicos son de gran utilidad en las tareas en que se llega a la solución no por
métodos numéricos, sino a través de expresiones matemáticas, con lo cual se evitan todos los
problemas causados por la precisión finita de los cálculos numéricos en los procesadores
digitales. Las herramientas simbólicas proveen funciones para manipular y resolver expresiones
matemáticas escritas a través de símbolos, de esta forma primero pueden resolverse sistemas de
ecuaciones en forma simbólica y después las expresiones obtenidas pueden ser evaluadas
numéricamente.
Dentro de las herramientas computacionales que más aceptación logran por sus posibilidades en
computación simbólica se encuentran Matlab y Mathematic. El Symbolic Math Toolbox sale al
mercado desde la versión 6 de Matlab al introducir las capacidades de programación sintáctica de
4
Maple, pero ampliando las posibilidades de este con las numéricas y gráficas que distinguen a
Matlab. En 2008 Mathworks compró MuPAD, siendo a partir de entonces la caja de herramientas
simbólicas de Matlab. Actualmente el Symbolic Math Toolbox se encuentra en su versión 3 (ver
en el Anexo 1 algunas de sus funciones), el cual además de poder resolver sistemas de
ecuaciones, puede también realizar otros cálculos simbólicamente, tales como integración,
diferenciación, simplificación de funciones, cálculo de transformadas de funciones (ej. Laplace y
Fourier) (MathWorks, 2002). Muchas de estas posibilidades son las que han permitido retomar el
análisis de la sensibilidad y la tolerancia de configuraciones de filtros activos desde la poderosa y
retadora perspectiva simbólica. El reto no radica en saber utilizar las herramientas simbólicas,
sino en dominar los principios ingenieriles subyacentes en el problema donde esta se aplica.
3. Propensión por las secciones de bajo orden
La función de red de un filtro activo de orden N finito responde a la forma general siguiente
H(s) =
...
...
...
...
,
(1)
siendo N
M. En esta función los coeficientes del numerador (b
j
) y denominador (a
k
) están en
función de la estructura del circuito y los valores de sus componentes. Si pudieran utilizarse
valores de componentes que conduzcan a valores exactos de los coeficientes necesarios las
respuestas del filtro, ya sean en frecuencia como transitorias, serían las esperadas pero al tener
que utilizar valores comerciales para los componentes, los que además tienen cierta tolerancia
alrededor de su valor nominal, inevitablemente los coeficientes modificarán su valor y con ello
se alteran las respuestas del filtro.
Ejemplo 1
La función de red de un filtro supresor de banda de sexto orden, obtenido mediante aproximación
de Butterworth, tiene la siguiente expresión:
H(s) =
.
.
.
.
.
.
.
.
.
.
Al calcular los valores de sus componentes y aproximarlos por valores comerciales suponga que
los verdaderos coeficientes toman los valores siguientes:
H(s) =
.
.
.
.
La figura 1 muestra los trazados de las respuestas de magnitud-frecuencias de ambas funciones.
A pesar de que las variaciones en los valores de los coeficientes son pequeñas puede apreciarse
una disminución en la selectividad del filtro con coeficientes aproximados, así como también una
disminución en la profundidad de la hendidura.
5
No obstante, el diagrama de polos y ceros revela una realidad mucho más preocupante como se
muestra en la figura 2. En esta se observa cómo una ligera modificación del valor de los
coeficientes ha provocado gran dispersión de los polos, lo que demuestra la gran sensibilidad de
estos, pero lo que es peor, los polos más cercanos al eje imaginario pasan al semiplano derecho
del plano complejo, convirtiendo el filtro en inestable.
Figura 1. Respuestas de magnitud-frecuencias de las funciones de red del ejemplo 1 con
coeficientes exactos y aproximados.
Figura 2. Diagramas de polos y ceros las funciones de red del ejemplo 1 con coeficientes
exactos y aproximados.
Un análisis de la expresión (1) puede determinar la sensibilidad de los polos ante las variaciones
de uno cualquiera de los coeficientes del polinomio del denominador de esta función. Para ello
será útil reescribir (1) en la forma siguiente:
10
-1
10
0
10
1
-100
-90
-80
-70
-60
-50
-40
-30
-20
-10
0
w (r/s)
|H
(j
w
)|
dB
Respuesta con Coeficientes Exactos
10
-1
10
0
10
1
-100
-90
-80
-70
-60
-50
-40
-30
-20
-10
0
w (r/s)
|H
(j
w
)|
dB
Respuesta con Coeficientes Redondeados
-1
-0.5
0
0.5
-1.5
-1
-0.5
0
0.5
1
1.5
3
3
Real Part
Im
ag
in
ar
y P
ar
t
Polos de Función Exacta
-1
-0.5
0
0.5
-1.5
-1
-0.5
0
0.5
1
1.5
3
3
Real Part
Im
ag
in
ar
y P
ar
t
Polos de Función Redondeada
6
H(s) =
...
...
...
. (2)
También la expresión (1) puede escribirse en función de las raíces del polinomio de su
numerador; esto es sus ceros, representados mediante z
j
, y las raíces del polinomio de su
denominador, sus polos, representados mediante p
k
, de la forma siguiente:
H(s) =
(
)(
)...
...(
)(
)
(
)(
)...(
)...(
)(
)
. (3)
Dado que la función de red es racional, estando dada por el cociente de dos polinomios; esto es,
H(s) = B(s) / A(s), teniendo que cumplirse que el polinomio de su denominador
A(s) =
=
( - ), con a
N
= 1.
(4)
Esta igualdad permite analizar cómo se modifica la posición del m-ésimo polo a partir de la
modificación del k-ésimo coeficiente del denominador; esto es, cómo:
a
k
± a
k
p
m
± p
m
.
(5)
De forma analítica,
( )
=
( )
,
(6)
con 0
k N y 1 m N.
Las derivadas parciales de cada miembro de (6) son:
( )
=
=
=
, (7)
( )
=
( - ) = -
( - ) .
(8)
Igualando términos a partir de (7) y (8), organizando y evaluando para el m-ésimo polo (s = p
m
),
p
m
=
|
|
|
|
.
(9)
La utilidad de análisis anterior radica en que se ha obtenido lo que se denomina factor de
sensibilidad de los polos con respecto a los coeficientes del filtro (encerrado en [ ]), el cual
permite determinar cómo reducir las variaciones que sufre cualquier m-ésimo polo (
p
m
) ante las
variaciones de uno cualquiera de los k-ésimo coeficientes (
). Para ello, del factor de
sensibilidad pueden extraerse los aspectos siguientes:
7
· Según el numerador del factor de sensibilidad, para |k N| > 1 los polos estables, pero
muy cercanos al eje imaginario (
p
0) se acercarán más al eje j que los más
alejados de este ya que dicho factor será mayor.
· Mientras mayor sea |k N| mayor será la sensibilidad de los polos ante un mismo ,
por lo que modificar a
0
afecta más que cualquier otro coeficiente.
· Según el denominador del factor de sensibilidad, polos muy cercanos entre sí, para los
cuales |p
m
p
l
|
0, son más sensibles, ante un mismo , que los que se encuentran
distante entre sí pues en ese caso el factor de sensibilidad aumenta.
El análisis anterior pudo haberse realizado para los ceros, con resultados semejantes, pero sin la
misma trascendencia pues, por una parte los ceros influyen principalmente en la banda de
rechazo del filtro y no en la de paso, cuyas propiedades están determinadas en lo fundamental
por los polos, mientras que por otra parte, los polos son los que determinan la estabilidad del
filtro, aspecto aún mucho más importante que las propiedades de sus respuestas.
El análisis realizado a partir de (9) sugiere varias recomendaciones, pero tal vez la más
significativa sea que cuando las funciones de red a realizar sean de elevado orden, donde los
polos están más próximos entre sí, es preferible descomponerlas en etapas de 1er y 2do orden en
cascada para que cada etapa realice a lo sumo, de forma aislada, un solo par de polos y también a
lo sumo, solo un par de ceros conjugados (imaginarios puros) si estos tienen frecuencia finita.
Otras ventajas de la realización mediante cascada de etapas de 1er y 2do orden son:
· Pueden diseñarse redes que combinen módulos de 1er y 2do orden con estructuras más
elaboradas en las que se regulen por separado diversos parámetros de la función de red.
· No hay que utilizar un circuito diferente para cada orden, sino que se combina el mismo
circuito, a manera de módulos, tantas veces como sea necesario en la cascada.
De esta forma, cada sección de 2do orden realiza un par de polos complejo-conjugados y,
dependiendo del tipo de respuesta de magnitud-frecuencias, a lo sumo un par de ceros; esto es,
sean los polos p
1,2
=
p
± j
p
, este tendrá magnitud
|
p
1
|
=
+
, por lo que
H(s) =
( )
(
)
=
( )
| |
.
(10)
El numerador de (10) depende del tipo de respuesta de magnitud-frecuencias, pudiendo ser para
el caso,
· pasobajo (LP), cuando tiene los dos ceros en s , quedando
B(s) = b
0
, (11a)
· pasoalto (HP), si tiene los dos ceros en s = 0, siendo
B(s) = Gs
2
,
(11b)
8
· pasobanda (BP), cuando tiene un cero en s = 0 y otro en s , siendo
B(s) = b
1
s,
(11c)
· supresor de banda (BR), también nombrado de hendidura (notch), pasobajo con
hendidura (LPN) y pasoalto con hendidura (HPN), si tiene los dos ceros en z
1,2
=
± j
z
,
siendo
N(s) = (
- )( -
) = +
= s
2
+ b
0
,
(11d)
por lo que en forma general una función de red de 2do orden puede adoptar también la forma
H(s) =
.
(12)
El denominador de (10) o de (12) queda totalmente caracterizado por lo que se denominan sus
dos parámetros, los cuales son:
· frecuencia del polo,
p
= |p| =
, la cual es la magnitud del polo (distancia de este
hasta s = 0) y no debe ser confundida con la
p
utilizada anteriormente, que es la parte
imaginaria del polo en el plano s, y
· factor de calidad del polo, Q =
| |
=
,
por lo que una tercera forma de la función de 2do orden es
H(s) =
,
(13)
donde en el numerador, salvo en el caso pasotodo (AP), dependiendo del tipo de respuesta de
frecuencia será cero alguno de los términos como se explicó anteriormente. Además, en caso de
existir un par de ceros imaginarios a frecuencias finitas,
z
=
, dependiendo entonces el tipo
de respuesta de frecuencias de la relación entre
z
y
p
; así el filtro será de hendidura (
z
=
p
),
pasobajo notch (
z
>
p
) o pasoalto notch (
z
<
p
). Es por ello que todo análisis de sensibilidad
y tolerancia puede concentrarse primordialmente en determinar cómo varían los parámetros
p
y
Q de la función de red de cada sección de 2do orden con respecto a las variaciones de los
componentes de la red a causa de sus tolerancias y, de ser de interés, como varían también los
demás parámetros (ej.
z
) (Mandache, Iordache, & Dumitriu, 2010; Moschytz, 2002).
4. Método simbólico para calcular parámetros de la función de red en configuraciones de
filtros de 2do orden
Los parámetros de una función de red de un filtro de 2do orden que determinan sus respuestas,
ya sean de frecuencia o transitorias, son la frecuencia del par de polos (
p
), el factor de calidad
del par de polos (Q), la frecuencia del par de ceros finitos (
z
) y su ganancia (G). Se excluyen de
9
este análisis las redes pasotodo donde los ceros tienen parte real no nula. Tales parámetros
dependen a su vez de los coeficientes (b
1
, b
0
, a
1
y a
0
) como se muestra en (12), por lo que el
procedimiento habitual para determinar los parámetros se basa en calcular la función de red del
circuito en forma polinómica y después con esta determinar las expresiones de los parámetros.
El método simbólico ofrece una excelente alternativa para determinar la función de red de una
configuración de circuito de 2do orden diseñada para un filtro activo. Para ello basta con un
correcto planteamiento de las ecuaciones de nodo del circuito teniendo en cuenta las propiedades
básicas de los amplificadores operacionales, ya sean considerados ideales o reales, a partir de lo
cual puede seguirse un procedimiento sistemático común para cualquier configuración.
Ejemplo 2
El circuito de la figura 3 es la configuración de 2do orden denominada de realimentación
múltiple (MFB: Multi-Feedback) con respuesta de frecuencias pasobanda (resonante). Su
función de red puede encontrarse en diversos textos o manuales de filtros activos, pero es fácil de
determinar utilizando métodos simbólicos a partir de las ecuaciones de nodo del circuito. Una
vez obtenida la función de red pueden calcularse, por la vía simbólica también, las ecuaciones de
realización para determinar los valores de sus componentes. Se realizará con esta red un filtro
pasobanda de 2do orden con frecuencia central de la banda de paso en f
0
= 1 kHz (en este caso f
0
= f
p
=
p
/2
), ancho de banda f = 200 Hz y ganancia unitaria (G = 1) a la frecuencia f
0.
El filtro
realizado debe ser simulado mediante Tina-TI utilizando el OPA364. Finalmente debe efectuarse
un análisis de Monte Carlo de las variaciones de la frecuencia f
0
en la respuesta de magnitud-
frecuencias con respecto a las variaciones del resistor R
2
.
Figura 3. Configuración de circuito de realimentación múltiple (MFB) pasobanda de 2do
orden.
En este circuito se identifican, además del nodo de entrada (con la fuente de voltaje V
i
) y el nodo
de salida, V
BP
, otros dos nodos internos: V
1
y V
2
, pero V
2
= 0 ya que es una tierra virtual si se
considera que el amplificador operacional es ideal, por lo que las incógnitas serán V
1
y V
BP
, para
las cuales serán necesarias dos ecuaciones de nodo como se muestran a continuación.
V
i
C
1
R
2
+V
BP
C
2
R
3
R
1
+
2
1
10
Nodo 1:
V
1
(1/R
1
+ 1/R
3
+ sC
1
+ sC
2
) V
BP
sC
2
= V
i
/R
1
.
Nodo 2:
-V
1
sC
1
V
BP
/R
2
= 0.
La definición de las variables, la representación del sistema de ecuaciones creado y su solución
en Matlab simbólico se realiza por medio de las siguientes líneas de instrucciones:
» syms
R1
R2
R3
C
real
;
» syms
s
V1
Vi
VBP
;
» SistEcuac = solve(
...
' V1*(1/R1 + 1/R3 + s*C1 + s*C2) - VBP*s*C2 = Vi/R1'
,
...
'-V1*s*C1 - VBP/R2 = 0'
,
...
' V1'
,
'VBP'
);
La solución del sistema de ecuaciones devuelve una estructura con dos objetos que son las
correspondientes ecuaciones de los voltajes de nodo (V
1
y V
BP
), por lo que la función de red del
circuito está dada por la relación entre V
BP
y V
i
, siendo
» Hs = SistEcuac.VBP / Vi;
Para agrupar todos los sumandos de igual orden estos pueden ser coleccionados.
» HsCol = collect(Hs, s);
» disp
'H(s) ='
; pretty(HsCol)
H(s) =
(-C1 R2 R3) s
-------------------------------------------------------
2
(C1 C2 R1 R2 R3) s + (C1 R1 R3 + C2 R1 R3) s + R1 + R3
La función de red obtenida responde a la forma general de segundo orden pasobanda dada por
H(s) =
, (14)
donde los coeficientes de los polinomios de numerador y denominador pueden obtenerse
utilizando dividiendo toda la función por el coeficiente del término de mayor orden (s
2
)
utilizando el método simbólico de la forma siguiente:
» syms
b1
a1
a0
» [num, den] = numden(HsCol);
» numCoefic = coeffs(num, s);
» denCoefic = coeffs(den, s);
» b1 = numCoefic(1) / denCoefic(3);
» disp
'b1 = '
; pretty(b1)
b1 =
1
- -----
C2 R1
» a1 = simple(denCoefic(2) / denCoefic(3));
11
» disp
'a1 = '
; pretty(a1)
a1 =
C1 + C2
--------
C1 C2 R2
» a0 = denCoefic(1) / denCoefic(3);
» disp
'a0 = '
; pretty(a0)
a0 =
R1 + R3
--------------
C1 C2 R1 R2 R3
Se ha llegado a que la función de red para la configuración de circuito dada es
H(s) =
( )
( )
=
.
(15)
Esta función de red del circuito, comparada con la forma general de una función pasobanda de
2do orden a partir de (13) tiene la forma
H(s) =
,
(16)
permitiendo determinar la dependencia de los parámetros G,
0
y Q de los componentes del
circuito, para lo cual se continúa utilizando el método simbólico de la forma siguiente:
» syms
G wp
Qp
» G = b1/a1;
» disp
'G = '
; pretty(G)
G =
C1 R2
- ------------
R1 (C1 + C2)
» wp = simple(sqrt(a0));
» disp
'wp = '
; pretty(wp)
wp =
/ R1 + R3 \1/2
| -------------- |
\ C1 C2 R1 R2 R3 /
» Q = simple(wp / a1);
» disp
'Q = '
; pretty(Q)
Q =
/ R1 + R3 \1/2
C1 C2 R2 | -------------- |
\ C1 C2 R1 R2 R3 /
------------------------------
C1 + C2
12
El circuito tiene cinco componentes (tres resistores y dos capacitores) y solo hay tres parámetros
en la función de red, por lo que hay que asumir como variables independientes dos de ellos.
Dado que para los capacitores hay menos diversidad de valores comerciales puede asumirse que
C
1
= C
2
= C. Con esta consideración pueden recalcularse las expresiones simplificadas para los
parámetros de la función de red.
» C1 = C;
» C2 = C;
» G = subs(G);
» disp
'G = '
; pretty(G)
G =
R2
- ----
2 R1
» wp = subs(wp);
» disp
'wp = '
; pretty(wp)
wp =
/ R1 + R3 \1/2
| ----------- |
| 2 |
\ C R1 R2 R3 /
» Q = subs(Q);
» disp
'Q = '
; pretty(Q)
Q =
/ R1 + R3 \1/2
C R2 | ----------- |
| 2 |
\ C R1 R2 R3 /
-----------------------
2
Esta última puede ser simplificada aún más de forma manual, quedando
Q =
(
)
.
(17)
Otro problema, contrario al camino seguido hasta este punto, es determinar las expresiones para
la realización del filtro; esto es, dados los valores de G, w
p
y Q que necesita el filtro, calcular a
partir de estos los valores de los componentes. Para ello resulta igualmente cómodo utilizar el
camino simbólico.
Dado que G,
p
y Q pasan a ser las variables independientes deben ser declaradas nuevamente.
Además, puede facilitarse la solución del problema de encontrar las expresiones para los tres
resistores si se tiene en cuenta que R
1
y R
2
están relacionados mediante la ganancia a la
frecuencia central de la banda de paso, con lo cual solo hay que crear un sistema de dos
13
ecuaciones para determinar R
2
y R
3
en función de
p
y Q. Por otra parte, los algoritmos
simbólicos suelen ser más eficaces evaluando términos cuadráticos que evaluando
simbólicamente la raíz cuadrada de una expresión, por lo que se modifican las expresiones
teniendo en cuenta este aspecto. Por último, dado que en las expresiones hay términos
cuadráticos tendrán dos soluciones, tomando de ellas la positiva solamente. Todo ello se efectúa
en los pasos siguientes:
» clear
G
wp
Q
» syms
G
wp
Q
» EcuacRealiz = solve(
...
'wp^2 = (R1 + R3) / (R1*R2*R3*C^2)'
,
...
'Q^2 = R2*(R1 + R3) / (4*R1*R3)'
,
...
'R2'
,
'R3'
);
» R1 = R2 / (2*G);
» disp
'R1 = '
; pretty(R1)
R1 =
R2
---
2 G
» R2 = EcuacRealiz.R2; R2 = simple(R2(1));
» disp
'R2 = '
; pretty(R2)
R2 =
2 Q
----
C wp
» R3 = EcuacRealiz.R3; R3 = simple(R3(1));
» disp
'R3 = '
; pretty(R3)
R3 =
R1
---------------
2 C Q R1 wp - 1
Se especifica que el filtro tenga frecuencia central de la banda de paso en f
0
= 1 kHz, ancho de
banda
f = 200 Hz y ganancia unitaria (G = 1) a la frecuencia f
0
. Para ello, continuando con el
método simbólico y teniendo en cuenta que R
3
depende de R
1
y a su vez R
1
depende de R
2
, así
como asumiendo un valor para los capacitores de 100 nF los componentes se realizan como se
muestra a continuación:
» f0 = 1e3;
» G = 1;
» BW = 200;
» C = 100e-9;
» Q = f0/BW
14
Q = 5
» wp = 2*pi*f0;
» R2 = subs(R2)
R2 = 1.591549430918954e+004
» R1 = subs(R1)
R1 = 7.957747154594768e+003
» R3 = subs(R3)
R3 = 1.624030031549953e+002
» C1 = C;
» C2 = C;
Una vez calculados los valores de los componentes debe verificarse si sustituyendo estos en la
función de red que se ha determinado para el filtro por el método simbólico se obtiene la
respuesta de frecuencias esperada. Para ello primeramente se obtendrá la función de red con los
valores sustituidos.
» HsEval = collect(subs(HsCol));
» [numHs, denHs] = numden(HsEval);
» NumPol = sym2poly(numHs);
» DenPol = sym2poly(denHs);
» HsSimp = tf(NumPol/DenPol(1), DenPol/DenPol(1))
Transfer function:
-1257 s
------------------------
s^2 + 1257 s + 3.948e007
La respuesta de frecuencias de esta función, en el intervalo entre 10
2
y 10
4
evaluando en 10
4
frecuencias con variación logarítmica se obtiene sustituyendo los valores numéricos en la
expresión simbólica.
» f = logspace(2, 4, 1e4);
» Hjw = subs(HsEval, s, 1i*2*pi*f);
» figure(1)
» semilogx(f, 20*log10(abs(Hjw)));
» grid; axis([f(1) f(end) -35 0])
» xlabel([
'\itf '
,
'\rm('
,
'\itHz'
,
'\rm)'
])
» ylabel([
'|'
,
'\itH'
,
'\rm('
,
'\itjw'
,
'\rm)|_{dB}'
])
» figure(2)
» semilogx(f, angle(Hjw)*180/pi);
» grid; axis([f(1) f(end) -180 180])
» xlabel([
'\itf '
,
'\rm('
,
'\itHz'
,
'\rm)'
])
» ylabel([
'\Theta('
,
'\itw'
,
'\rm)'
])
15
La respuesta de magnitud mostrada en la figura 4 cumple con las especificaciones dadas en
cuanto a f
0
y
f, mientras que la de fase confirma que la red es inversora en su banda de paso
pues alrededor de f
0
la diferencia de fase entre salida y entrada es 180
°.
Figura 4. Respuesta de magnitud y fase contra frecuencias del filtro pasobanda realizado
en el ejemplo 2 con f
0
= 1 kHz,
f = 200 Hz. y G = 1 utilizando la red MFB.
El circuito simulado mediante Tina-TI
utilizando el amplificador operacional
OPA364 con fuente desbalanceada (+V) se
muestra en la figura 5 con su respuesta de
magnitud-frecuencias y un detalle de la
misma, verificándose que f
0
= 999.1 Hz,
mientras que
f = 200.17 Hz, por lo que se
satisfacen las especificaciones de diseño.
Figura 5. Simulación mediante Tina-TI del filtro pasobanda del ejemplo 2 utilizando la red
MFB, su respuesta de magnitud-frecuencias y un detalle de su banda de paso.
10
2
10
3
10
4
-35
-30
-25
-20
-15
-10
-5
0
f (Hz)
|H
(jw
)|
dB
10
2
10
3
10
4
-150
-100
-50
0
50
100
150
f (Hz)
(w
)
T
Frequency (Hz)
100.00
1.00k
10.00k
Gai
n
(dB
)
-35.00
-30.00
-25.00
-20.00
-15.00
-10.00
-5.00
0.00
T
Frequency (Hz)
850.00
1.00k
1.18k
Gai
n
(dB
)
-5.00
-4.00
-3.00
-2.00
-1.00
0.00
R1 7.96k
R2 15.92k
R
3 16
2.
4
C1 100n
C2 100n
+
VG1
VF1
Cb 100n
+
-
+
U1 OPA364
V1 2.5
V2 5
16
El procedimiento seguido para determinar la función de red de una configuración de circuito de
2do orden para filtro activo es sistemático, el mismo depende principalmente del planteamiento
del sistema de ecuaciones de nodo de acuerdo a los voltajes incógnitas en el circuito. En el anexo
2 se incluyen los sistemas de ecuaciones de nodo para algunas configuraciones de 2do orden. A
partir de estas ecuaciones, el resto de los pasos utilizando la vía simbólica son comunes para
cualquier configuración de circuito, por lo que encontrar las expresiones de los coeficientes de la
función de red, de sus parámetros en términos de sus componentes, de las expresiones para
realizar los componentes en términos de los parámetros de la función de red, no requiere de
grandes análisis, salvo alguna particularidad propia de cada tipo de respuesta de frecuencias ya
que para cada una cambia la forma del numerador.
5. Procedimiento simbólico en el cálculo de la sensibilidad de los parámetros de la función
de red de un filtro de 2do orden
Se ha demostrado que realizar los filtros de elevado orden mediante secciones de 2do orden
colocadas en cascada reduce su sensibilidad al aislar cada par de polos complejos conjugados de
la función de red (y cada par de ceros conjugados si tienen frecuencias finitas) en secciones
independientes.
Teniendo el filtro activo descompuesto en secciones de 2do orden, el problema es entonces
determinar la sensibilidad de cada sección a los componentes que la realiza. De esta forma, si
cada sección de segundo orden caracteriza a su par de polos y ceros (cuando son finitos) por
cuatro parámetros como máximo: la frecuencia del par de polos (
p
), el factor de calidad del par
de polos (Q), la ganancia (G), que no puede ser despreciada ya que algunas configuraciones de
circuito logran regular Q por medio de G, y la frecuencia del par de ceros (
z
), lo usual es
determinar la sensibilidad de estos cuatro parámetros a cada uno de los componentes pasivos de
la red que realiza el filtro. Se debe tener presente que el desplazamiento de los polos y ceros de
su posición nominal no solo modifica las respuestas del filtro (en frecuencias o transitorias) sino
también compromete su estabilidad.
Se define sensibilidad relativa como la variación que sufre un parámetro Y como consecuencia de
la variación que experimenta el componente X del circuito del filtro; esto es
=
lim
.
(18)
Para cambios pequeños esta puede aproximarse mediante
=
=
.
(19)
Si el parámetro Y es función de diversas variables (X
1
, X
2
, ...) la sensibilidad de Y con respecto al
parámetro X
i
es
17
=
=
=
(
)
(
)
.
(20)
La
expresa el % de cambio que sufre el parámetro Y de la función de red ante un % de
cambio del componente X
i
del circuito. Por ejemplo, si en una configuración de circuito para un
filtro activo de 2do orden la sensibilidad de su
p
con respecto al resistor R
2
es -0.5, lo cual se
denota mediante
= -0.5, ello significa que si R
2
se incrementa o disminuye en un 1% el
valor de
p
disminuye o incrementa un 0.5%, o lo que es lo mismo, en un factor -0.005.
Algunas propiedades de la sensibilidad, a partir de (20), son las siguientes.
Sensibilidad Expresión
equivalente
(c constante)
(c constante)
(c constante)
1
(c constante)
+
/
-
/
-
/
-
si
Y = Y(u
1
(u
2
)).
La sensibilidad relativa anteriormente definida también se denomina sensibilidad normalizada ya
que al estar afectada por el factor X
i
/Y es adimensional y no depende de las magnitudes absolutas
de X
i
o Y, por lo que puede ser utilizada para comparación entre diversos circuitos. De esta forma
representa las variaciones relativas del parámetro con respecto a las variaciones relativas de la
componente cuando ambos se desvían de sus respectivos valores nominales. También se definen
la sensibilidad absoluta de Y con respecto a X
i
como
/
y la sensibilidad semi-relativa
como
/ .
18
Ejemplo 3
Se desea determinar, en el circuito utilizado en el ejemplo 2, cuál es la sensibilidad teórica de la
frecuencial f
0
=
0
/2
con respecto al resistor R
2
.
Teniendo en cuenta la propiedad
= , a partir de que la constante c = 1/2
, la sensibilidad
buscada está dada por
=
/
/
=
(
)
(
)
.
(21)
Para resolver (21) es conveniente reescribir la expresión de la frecuencia central de la banda de
paso en una forma más simplificada que la obtenida en el ejemplo anterior; además, se
considerarán los dos capacitores diferentes para mayor generalidad del análisis.
0
=
.
(22)
Determinando el logaritmo de
0
ln(
0
) =
½[
ln(R
1
+R
3
) ln(R
1
) ln(R
2
) ln(R
3
) ln(C
1
) ln(C
2
)
]
.
Su derivada con respecto a ln(R
2
) es
=
-
½
.
De la misma forma pueden determinarse las sensibilidades de f
0
con respecto a R
1
, R
3
, C
1
y C
2
,
así como las sensibilidades de Q a todos los componentes pasivos.
A este mismo resultado pudo haberse llegado por medio de Matlab simbólico. En ese caso
resulta más práctico partir del siguiente planteamiento teniendo en cuenta las ventajas de la
función diff del Symbolic Math Toolbox,
=
/
/
=
.
(23)
De esta forma puede determinarse
haciendo
» syms
f0 R1 R2 R3 C1 C2
» f0 = sqrt((R1 + R3) / (R1*R2*R3*C1*C2));
» disp
'f0 = '
; pretty(f0)
f0 =
/ R1 + R3 \1/2
| -------------- |
\ C1 C2 R1 R2 R3 /
» df0dR2 = diff(f0, R2);
» disp
'dfo/dR2 = '
; pretty(df0dR2)
19
dfo/dR2 =
R1 + R3
- ---------------------------------------
2 / R1 + R3 \1/2
2 C1 C2 R1 R2 R3 | -------------- |
\ C1 C2 R1 R2 R3 /
Manipulando el resultado anterior
=
-
=
=
-
=
-
.
Sustituyendo en (23),
=
=
-
=
-
½
.
Puede verificar que si se incluye en los cálculos la constante 2
que relaciona a
0
con f
0
se llega
al mismo resultado por medio del procedimiento anterior. Si R
2
varía un 10 % por encima y por
debajo de su valor nominal, que es de R
2
nom
= 15.915 k
sus valores extremos son:
R
2
max
= R
2
nom
(1 + 0.1) = 17.507 k
.
R
2
min
= R
2
nom
(1
- 0.1) = 14.324 k
.
Las respuestas de magnitud-frecuencias obtenidas simulando el circuito mediante Tina-TI
utilizando los valores extremos de R
2
son las que se muestran en la figura 6, en la cual se aprecia
que la respuesta de magnitud-frecuencias utilizando R
2
max
= 17.507 k
desplaza la frecuencia de
resonancia hasta f
0
min
= 952 Hz, mientras que para R
2
min
= 14.324 k
esta se desplaza hasta f
0
máx
= 1.052 kHz. Este resultado confirma el significado del signo negativo de
.
Figura 6. Respuestas de magnitud-frecuencias del filtro del ejemplo 2 simulado mediante
Tina-TI cuando R
2
toma valores R
2
max
(izq.) y R
2
min
(der.) con 10 % de tolerancia.
T
Frequency (Hz)
500.00
629.96
793.70
1.00k
1.26k
1.59k
2.00k
Ga
in
(
dB
)
-20.00
-15.00
-10.00
-5.00
0.00
5.00
x = 952, y = 0.82
T
Frequency (Hz)
500.00
629.96
793.70
1.00k
1.26k
1.59k
2.00k
Ga
in
(
dB
)
-20.00
-15.00
-10.00
-5.00
0.00
5.00
x = 1052, y = -0.92
20
De los resultados de las simulaciones anteriores puede calcularse la sensibilidad de la frecuencia
de resonancia a R
2
para la red MFB mediante
=
=
(
)
.
(
)
=
-0.500765
Puede verificarse con algunos valores intermedios de R
2
, entre R
2
max
y R
2
min
, que las variaciones
de f
0
siguen una relación muy próxima a la lineal con respecto a las variaciones de este resistor
dentro de cierto rango, por lo que puede estimarse f
0
si se conoce el valor del resistor cuando
difiere del nominal. La figura 7 muestra esta relación.
Figura 7. Variación de f
0
cuando se modifica R
2
para el filtro MFB del ejemplo 2 cuando
esta toma valores entre R
2
max
y R
2
min
con el 10 % de tolerancia.
El resultado de la simulación confirma experimentalmente el valor de sensibilidad calculado
teóricamente.
Resulta oportuno recalcar que el análisis de la sensibilidad se realiza basado en el análisis de la
tolerancia de los componentes del circuito. Dado que todos los componentes pueden variar
alrededor de su valor nominal y dentro de su margen de tolerancia, el análisis de la tolerancia que
puede admitirse para cada componente es la base para el análisis de la sensibilidad con el
propósito de encontrar el rango de variación de los parámetros de interés de las respuestas del
filtro. Esto es, el problema del análisis de la tolerancia durante el diseño de un filtro consiste en
encontrar el posible margen de variación de cada componente que garantice que las variaciones
de los parámetros de las respuestas del circuito tengan una distribución aceptable para que no
comprometan su desempeño. Para ello se han desarrollado recientemente varias técnicas, pero las
que se reconocen como de mayor potencialidad y eficacia se han basado hasta ahora en el
análisis de Monte Carlo.
R
4
R
2
max
R
2
min
f
0
max
f
0
min
f
0
21
6. Análisis de Monte Carlo de la respuesta de magnitud-frecuencias para las variaciones de
un componente del filtro
La sensibilidad de un parámetro de la función de red de un circuito (ej.
z
,
p
, Q y G) a la
tolerancia de alguna componente, en la forma vista anteriormente, devuelve un valor numérico
que no expresa cómo varían las respuestas de interés del filtro (ej. respuestas de frecuencia o
transitorias) ante la tolerancia de alguno o varios componentes en caso de que puedan modificar
sus valores cualquiera de estos simultáneamente. Es por ello que ha sido una práctica el análisis
de Monte Carlo de las respuestas del filtro ante las variaciones de los valores sus componentes a
causa de la tolerancia.
El análisis de Monte Carlo, también denominado en la literatura en lengua inglesa como Statistic
Analogical Experiment Analysis o también Random Analogy Analysis hace variar aleatoriamente
dentro, de un intervalo, a los valores de los componentes de interés en el circuito y determina el
conjunto de respuestas que estas variaciones producen. Por tanto, es un método estadístico de
análisis que calcula la respuesta de un circuito cuando los parámetros del mismo varían
aleatoriamente. Para ello utiliza múltiples cálculos numéricos de la respuesta a analizar
basándose en la teoría de las probabilidades para asignar valores a los componentes del circuito
de acuerdo a alguna distribución estadística que se especifique y dentro de su margen de
tolerancia. Con el análisis de Monte Carlo puede realizarse un análisis estadístico de las
respuestas logradas, pudiendo determinarse el comportamiento medio, las respuestas extremas,
confeccionar histogramas de los resultados, etc. No obstante, su seguridad está limitada por el
tiempo de cálculo o por el monto de variantes a calcular, mientras más variantes más confianza
en los resultados, por lo que generalmente se efectúan cientos o miles de corridas para poder
arribar a resultados con mayor nivel de confianza. (Erdei, 2007; Fitzpatrick, 2012; Shujuan,
Zhiping, & Hongliang, 2005)
El análisis de Monte Carlo forma parte de las opciones de muchas herramientas para simulación
y análisis de circuitos como Tina-TI y PSpice (MultiSim) por ejemplo; no obstante este puede
realizarse con gran facilidad mediante Matlab si se dispone de la función de red del circuito.
Ejemplo 4
Se desea realizar un análisis de Monte Carlo de las variaciones que sufre la respuesta de
magnitud-frecuencias del filtro pasobanda realizado en el ejemplo 2 utilizando la configuración
MFB con f
0
= 1 kHz,
f = 200 Hz y G = 1 a f
0
, ante las variaciones que puede experimentar R
2
suponiendo que esta varía con una tolerancia del 10 % alrededor de su valor nominal y pudiendo
tomar valores aleatorios con distribución uniforme en ese intervalo.
Las variaciones del resistor R
2
se simulan generando aleatoriamente valores de este con media
igual a su valor nominal y distribución de densidad probabilística uniforme dentro del intervalo
del 10 % de su valor nominal. Para ello se genera un vector con 50 valores de R
2
y, trabajando en
forma matricial mediante Matlab, se genera igual número de respuestas de frecuencias, las cuales
22
se trazan en el intervalo de 800 a 1300 Hz con resolución de 0.01 Hz. El código en Matlab es el
siguiente y su resultado se muestra en la figura 8.
» Tol = 10;
% Tolerancia en %.
» NV = 50;
% Número de variantes.
» R2m = R2*(1 + 0.02*Tol*(rand(NV, 1)-0.5));
» R2m = round(100*R2m)/100;
» b1 = 1 / (R1*C2);
» b = [0 -b1 0];
% Numerador: B(s).
» a2 = ones(NV, 1);
» a1 = (C1 + C2) ./ (R2m*C1*C2);
» a0 = (R1 + R3) ./ (R1*R2m*R3*C1*C2);
» a = [a2 a1 a0];
% Denominador: A(s).
» f = 800 : 0.01 : 1300;
» H = freqs(b, a(1, :), 2*pi*f);
» semilogx(f, 20*log10(abs(H))); hold
on
»
for
k = 2 : NV,
H = freqs(b, a(k, :), 2*pi*f);
semilogx(f, 20*log10(abs(H)));
»
end
» grid; hold
off
Figura 8. Análisis de Monte Carlo de las variaciones de f
0
cuando se modifica R
2
tomando
valores aleatorios con el 10 % de tolerancia para el filtro MFB del ejemplo 2.
23
Los 50 trazados de la respuesta de magnitud-frecuencias tienen como extremos de f
0
casi los
mismos encontrados simulando el circuito con Tina-TI; esto es, 952 Hz y 1.052 kHz. Nótese
además que los picos de resonancia se desplazan aproximadamente sobre una recta entre estos
dos valores extremos. Esto confirma que la relación entre las variaciones del resistor R
2
y la
frecuencia central sigue una relación lineal dentro de cierto intervalo.
El análisis de Monte Carlo para R
2
muestra que esta también influye sobre la ganancia, pues a
través de ella se establece una de las vías de realimentación del AOp, lo cual se había observado
mediante la simulación del circuito con Tina-TI.
Dado que los valores de R
2
se generan aleatoriamente con una distribución de probabilidad
uniforme, y que solo se generan 50 valores en el intervalo entre el 90 % y el 110 % de R
2
(10 %
de tolerancia) es evidente que no todos los posibles valores de este resistor se generen en una
realización. Si se desea determinar la tendencia de los valores extremos de f
0
deben promediarse
varias realizaciones.
Muy importante es saber relacionar el resultado de un cálculo teórico de la sensibilidad con el
resultado práctico que debe producir un circuito. El análisis de Monte Carlo generalmente se
realiza variando aleatoriamente todos los componentes pasivos del circuito; no obstante, puede
aplicarse cuando se desea conocer las variaciones que se producen en un parámetro de la
respuesta del circuito ante las variaciones de alguno de sus componentes.
El análisis de Monte Carlo es un método costoso pues se basa en múltiples simulaciones que se
realizan repetidamente. Ello se debe a que es un método basado en la estadística, lo cual hace
que necesite de varios cientos, o tal vez miles, de muestras para arribar a resultados
estadísticamente aceptables. Mientras más simulaciones mayor precisión en los resultados,
principalmente cuando se desean determinar parámetros estadísticos de las respuestas obtenidas,
tales como valor medio, varianza, etc. Teóricamente, si N es el número de simulaciones o
respuestas del filtro ante N combinaciones de variaciones aleatorias de sus componentes, las N
respuestas obtenidas definen el área esperada de la verdadera respuesta, pero de esta forma no se
garantiza que se encuentre la peor variante de combinación de los valores de los componentes,
excepto si N
. (Hayes, Tadeo, & Salazar, 2010)
Es por ello que el análisis de Monte Carlo demanda un alto esfuerzo computacional y tiempo de
cálculo, lo cual ha conducido a que recientemente se hayan encontrado alternativas más
eficientes basadas en el análisis de valores extremos de tolerancia (WCTA: worst-case tolerance
analysis), los diagramas de decisión determinante (DDD: Determinant Decision Diagrams)
(Palma-Rodriguez, Tlelo-Cuautle, Rodriguez-Chavez, & Tan, 2012) o los algoritmos simbólicos
(Mandache et al., 2010), destinándose fundamentalmente el análisis de Monte Carlo para
condiciones en los que no se dispone de un modelo matemático del circuito (Shujuan et al.,
2005). No obstante, actualmente muchas herramientas para simulación y análisis de circuitos (ej.
PSpice, Tina-TI, etc.) ofrecen la posibilidad del análisis de Monte Carlo, aunque generalmente
24
para el caso en que todos los componentes varían simultáneamente, por lo que de esa forma
resulta difícil determinar los componentes críticos del circuito. Por ejemplo, para realizar el
análisis de la sensibilidad de un parámetro (ej. f
0
) a una componente individual debe asignarse
diversos valores a esta (como parámetro variable) y determinar para cada valor de la componente
el valor medio del parámetro en el análisis de Monte Carlo para luego calcular, como se realizó
anteriormente
= (
/ ) /
/
(Raut & Swamy, 2010). A pesar de ello, dado que
siempre se evalúa un conjunto finito de alternativas, no es del todo probable poder determinar el
peor caso en que las tolerancias de los componentes afectan el desempeño del filtro.
En particular el método WCTA, que busca determinar los márgenes de tolerancia en los
componentes que aseguran que los límites máximo y mínimo de una respuesta del filtro no
sobrepase determinado margen de desempeño, adolece de la incertidumbre debida a que es difícil
predecir cuál es la combinación de valores extremos de los componentes que conduce al peor
caso en el desempeño de un circuito, principalmente cuando el WCTA se acomete mediante
análisis de Monte Carlo (Kolev, 2002). La razón de ello radica en que los análisis de peor caso se
sustentan en la idea de que si todos los componentes del circuito asumen simultáneamente sus
valores máximos y mínimos (extremos) dentro de sus respectivas tolerancias es posible que las
respuestas logradas sean el peor caso. Como quiera que sea, encontrar las condiciones para la
peor variante es todo un reto. Al efecto se han publicado algunos trabajos como los de Hayes et
al. (2010) basados en el uso de valores singulares estructurados a partir de la teoría del control
robusto que tiene la ventaja de determinar el peor caso basado en repeticiones pero no de forma
estadísticas, sino en un procedimiento equivalente a los análisis de estabilidad de sistemas. Si
bien el método tiene su potencialidad requiere de sólidos conocimientos de teoría del control y
de la aplicación de espacios de estado para su aplicación.
Por su parte los DDD se basan también en métodos simbólicos, pero están más encaminados a
circuitos de gran complejidad y tamaño con muchos transistores donde deben manipularse gran
número de términos simbólicos. En tal caso la complejidad es mitigada siguiendo un algoritmo
gráfico o diagrama de decisión determinante.
7. Alternativa simbólica al análisis de Monte Carlo basada en la sensibilidad de
transferencia
En epígrafes anteriores se ha abordado la forma de encontrar funciones de redes para las
configuraciones de los filtros, parámetros de estas y respuestas del circuito. Se ha visto cómo
determinar la sensibilidad de un parámetro de la función de red a las variaciones de un
componente del circuito que posee determinada tolerancia, y se ha realizado el análisis de Monte
Carlo de la respuesta de magnitud-frecuencias de un filtro ante las variaciones de un solo
componente del circuito. Incluso, se ha utilizado un método que pudiera ser catalogado de
"fuerza bruta" para determinar la sensibilidad de un parámetro de la función de red (f
0
) variando
experimentalmente el valor de un componente del circuito simulado mediante Tina-TI. El motivo
de catalogarlo así radica en que, además de ser poco preciso por basarse en determinar puntos
25
sobre respuestas muy cercanas, el tiempo necesario y el costo computacional para obtener el
resultado es elevado por la necesidad de realizar múltiples simulaciones. Incluso las herramientas
computacionales que lo realizan invierten para ello gran cantidad de tiempo. Una alternativa
reconocida por diversos autores, la cual es poderosa, eficiente y eficaz, la brindan los algoritmos
simbólicos (Palma-Rodriguez et al., 2012).
En este epígrafe se extiende el análisis de la sensibilidad a toda la función de red, utilizando
como caso de estudio la respuesta de frecuencias de esta, ante la variación de todos los
componentes del circuito como una alternativa al análisis de Monte Carlo y de valores extremos.
Es por ello que a diferencia del concepto de sensibilidad utilizado anteriormente, ahora se aborda
el concepto de función de sensibilidad.
El enfoque clásico de abordar la función de sensibilidad plantea que si H(s) es la función de red
del circuito de un filtro de 2do o 1er orden, la cual es una función racional dada por el cociente
de polinomios B(s) / A(s) como se mostró en (12), las variaciones normalizadas que esta
experimenta debido a las modificaciones de sus coeficientes se puede expresar mediante
( )
( )
=
( )
+
( )
,
(24)
donde
( )
y
( )
son las sensibilidades del numerador y denominador respectivamente a las
variaciones de sus coeficientes, siendo dependiente de los valores de los coeficientes y de la
frecuencia compleja s, por lo que es a su vez una función de la frecuencia
. Al mismo tiempo,
las variaciones de los coeficientes están en función de las variaciones de los componentes del
filtro (resistores, capacitores y ganancia), siendo para los coeficientes del numerador
=
+
+
,
(25a)
y para los coeficientes del polinomio del denominado
=
+
+
,
(25b)
donde R
son los resistores, C
v
los capacitores y
l
los coeficientes de realimentación de los
amplificadores operacionales (Jurisic et al., 2001),(Moschytz, 2002).
De (24) se comprende que la sensibilidad de la función de red, o de las respuestas que de esta se
esperan, es la misma para cualquier filtro que tenga la misma estructura en su función de red;
esto es, los mismos coeficientes. Por ejemplo, todo filtro pasobanda de 2do orden con un cero en
el origen y el otro en infinito tiene una función de red con la forma dada en (14), por lo que todos
tendrán la misma sensibilidad a las variaciones en la misma proporción del mismo coeficiente.
Por el contrario (25) muestra que cada coeficiente de la función de red tiene una sensibilidad que
depende de la expresión que relaciona el coeficiente con los elementos del circuito, lo cual
depende del tipo de topología que este tenga y de la tolerancia que se utilice para cada
26
componente en particular. A partir de ello es que muchas veces se analizan las sensibilidades de
los parámetros que determinan las respuestas de un filtro de 2do orden (
z
,
p
, Q y G) ya que
como se ha visto anteriormente son función de los coeficientes del filtro. En resumen, la
sensibilidad de la función de red a las variaciones de los coeficientes del filtro dada en (24), la
que además depende de (25) no resulta práctica pues para cada configuración de circuito hay una
expresión diferente de los coeficientes en función de la estructura del circuito. No obstante, este
ha sido el enfoque clásico en el que se basan los análisis de sensibilidad.
Un enfoque más actual, que también permite la utilización de métodos simbólicos y ofrece de
una forma más directa la sensibilidad de cualquier tipo de respuesta del filtro, utiliza
directamente la sensibilidad relativa de la función de red a las variaciones de cualquiera de los
componentes del filtro a partir de definir (Mandache et al., 2010), (Jurisic, 2014)
( ) =
( )
( )
=
( )
, (26)
la cual, además de depender de los componentes x
i
, que son los resistores, capacitores y
cualquier otro parámetro del circuito, depende también de la frecuencia compleja s. La expresión
(26) también se acostumbra denominar sensibilidad de transferencia (transfer sensitivity) por
expresar la sensibilidad de la función de red a las variaciones de los componentes, mientras que
la sensibilidad dada por medio de las expresiones (19) o (20) se denomina sensibilidad de
parámetro (parameter sensitivity).
Si se desea analizar la sensibilidad de transferencia utilizando como caso de estudio la respuesta
de magnitud-frecuencias debe evaluarse la expresión anterior para s = j
, lo cual parte de:
H(j
) =
|
H(j
)
|
exp
{
j
(
)
}
.
Aplicando logaritmo natural
ln H(j
) = ln
|
H(j
)
|
+ j
(
) =
= A(
) + j
(
),
(27)
donde a causa del logaritmo A(
) tiene unidades de Nepers, mientras que
(
) sigue dándose en
radianes.
Sustituyendo (27) en la expresión de la sensibilidad relativa (26) se obtiene:
(
)
=
(
)
( )
+ j
(
)
( )
.
En este resultado se identifican la sensibilidad relativa de la respuesta de magnitud-frecuencias,
()
= Re
(
)
=
(
)
( )
,
(28a)
y la sensibilidad relativa de la respuesta de fase-frecuencias,
27
()
= Im
(
)
=
(
)
( )
.
(28b)
Estas son fáciles de obtener a partir de disponer de la función de red de la sección del filtro si se
utilizan algoritmos simbólicos.
La ventaja de esta alternativa, comparada con el método de Monte Carlo tradicional, radica en
que no es necesario realizar múltiples simulaciones del circuito para trazar las diversas
respuestas, ya sea de magnitud como de fase contra frecuencias, que se producen variando
sucesivamente valores de los componentes del circuito. Por el contrario, la determinación de
()
y
()
permite determinar mediante un solo trazado de cada una la magnitud de la
variación de estas respuestas en función de la frecuencia, con la ventaja adicional que no se
realizan grandes volúmenes de cálculos numéricos ya que se trabaja con expresiones simbólicas.
Si se conoce la forma simbólica de la función de red del filtro y se consideran n valores
intermedios de frecuencias en los que se desean evaluar
()
y
()
, el análisis de la
variación de estos se convierte en un procedimiento sistemático y fácil de realizar. En este caso,
dado que las funciones de red de los filtros activos de 2do orden son funciones racionales, dadas
por el cociente de dos polinomios en s, numerador y denominador, con coeficientes reales y
exponentes enteros; eso es, H(s) = B(s) / A(s), la aplicación del logaritmo natural también
involucra que:
( )
=
( )
-
( )
.
(29)
Ejemplo 5
Para el filtro pasobanda de 2do orden diseñado en el ejemplo anterior con frecuencia central de la
banda de paso en f
0
= 1 kHz, ancho de banda
f = 200 Hz y G = 1 a f
0
, se deteminará, utilizando
Matlab simbólico, la expresión de la sensibilidad de su respuesta de magnitud-frecuencias ante
las variaciones de R
2
. Se trazará además la función de sensibilidad de la respuesta de magnitud-
frecuencias ante las variaciones del resistor R
2
para el caso en que este tenga una tolerancia del
10 % alrededor de su valor nominal. Por último se mostrará la respuesta de magnitud-frecuencias
del filtro con las desviaciones que sufre a causa de las variaciones de R
2
.
A partir de la función de red del circuito y utilizando las herramientas simbólicas de Matlab, se
construye primeramente la función de red.
» syms
s
;
» syms
R1
R2 R3
C1
C2 real
;
» NumHs = -s / (R1*C2);
» DenHs = s^2 + s*((C1 + C2) / (R2*C1*C2)) +...
(R1 + R3) / (R1*R2*R3*C1*C2);
» Hs = NumHs / DenHs;
28
Como se puede apreciar, los componentes que pueden afectar la sensibilidad de la función de red
son las constantes que intervienen en las expresiones del numerador y denominador de H(s), las
cuales son: R
1
, R
2
, R
3
, C
1
y C
2
.
Evaluando para s = j
se obtiene
» syms
w
» Num_jw = subs(NumHs, s, 1i*w)
Num_jw =
-(w*i)/(C2*R1)
» Den_jw = subs(DenHs, s, 1i*w)
Den_jw =
(R1 + R3)/(C1*C2*R1*R2*R3) - w^2 + (w*(C1 + C2)*i)/(C1*C2*R2)
Dado que se desea determinar la sensibilidad de la respuesta de magnitud-frecuencias a los
componentes del circuito, es conveniente calcular las expresiones de la función magnitud del
numerador y denominador separadamente. Aunque Matlab simbólico posee las funciones real e
imag para calcular de manera simbólica las partes real e imaginaria de una expresión simbólica,
estas devuelven expresiones muy extensas, siendo preferible determinar las respectivas funciones
de magnitud separando manualmente las partes real e imaginaria del numerador y denominador
de la forma siguiente.
» ReNum_jw = 0;
» ImNum_jw = -w/(C2*R1);
» MagnNum = simple(sqrt(ReNum_jw^2 + ImNum_jw^2));
» pretty(MagnNum)
/ 2 \1/2
| w |
| ------- |
| 2 2 |
\ C2 R1 /
» ReDen_jw = (R1 + R3) / (C1*C2*R1*R2*R3) - w^2;
» ImDen_jw = w*(C1 + C2) / (C1*C2*R2);
» MagnDen = simple(sqrt(ReDen_jw^2 + ImDen_jw^2));
» pretty(MagnDen)
/ 2 2 \1/2
| / 2 R1 + R3 \2 w (C1 + C2) |
| | w - -------------- | + ------------- |
| \ C1 C2 R1 R2 R3 / 2 2 2 |
\ C1 C2 R2 /
Las respectivas sensibilidades del numerador y denominador de la respuesta de magnitud-
frecuencias ante las variaciones de R
2
están dadas por
29
» SeNumMagR2 = simple(diff(MagnNum, R2) * R2/MagnNum);
» pretty(SeNumMagR2)
0
» SeDenMagR2 = simple(diff(MagnDen, R2) * R2/MagnDen);
» pretty(SeDenMagR2)
/ / 2 R1 + R3 \ \
| 2 2 2 (R1 + R3) | w - -------------- | |
| 2 w (C1 + C2) \ C1 C2 R1 R2 R3 / |
R2 | --------------- - ----------------------------------- |
| 2 2 3 2 |
\ C1 C2 R2 C1 C2 R1 R2 R3 /
- ------------------------------------------------------------
/ 2 2 \
| / 2 R1 + R3 \2 w (C1 + C2) |
2 | | w - -------------- | + ------------- |
| \ C1 C2 R1 R2 R3 / 2 2 2 |
\ C1 C2 R2 /
Como puede apreciarse, la sensibilidad del numerador de la respuesta de magnitud-frecuencias a
las variaciones de R
2
es cero ya que el numerador no depende de este resistor. Por otra parte, la
sensibilidad del denominador de la respuesta de magnitud-frecuencias no solo depende de todos
los componentes del circuito, sin que también es función de la frecuencia.
De esta forma la sensibilidad de la respuesta de magnitud-frecuencias al resistor R
2
es
» SeMagHw_R2 = SeNumMagR2 SeDenMagR2;
Dado que la sensibilidad del numerador de la respuesta de magnitud-frecuencias de esta
configuración de circuito no depende de R
2
, entonces la sensibilidad de toda su respuesta de
magnitud-frecuencias coincide con el negativo de la mostrada anteriormente para el
denominador.
Para trazar la sensibilidad de la respuesta de magnitud-frecuencias ante las variaciones del
resistor R
2
debe sustituirse en ella los valores de todos los componentes del filtro diseñado y
posteriormente evaluar la expresión resultante para las frecuencias en que se desea conocer tal
sensibilidad.
» R1 = 7.957747154594768e+003;
» R2 = 1.591549430918954e+004;
» R3 = 1.624030031549953e+002;
» C1 = 100e-9;
» C2 = 100e-9;
» Tol = 0.1;
» SeMagHw_EvR2 = simplify(subs(SeMagHw_R2))*Tol*8.685889638065;
30
En el cálculo de la sensibilidad se ha utilizado el factor 8.685889638065 ya que esa es la
proporción que existe para cualquier número x (siempre que x > 0) entre 20 log
10
(x) / ln(x), la cual
se conoce como relación dB / Neper. Téngase presente que para obtener la expresión de la
sensibilidad de la respuesta de magnitud-frecuencias separada de la de fase-frecuencias se parte
de asumir que se ha calculado el logaritmo natural de la respuesta de frecuencias del filtro como
está planteado en (27).
Corresponde seguidamente evaluar la función obtenida para frecuencias logarítmicamente
espaciadas desde 100 Hz hasta 10 kHz, mostrándose su resultado en la figura 9.
» f = logspace(2, 4, 1e4);
» SeHw_EvR2_f = subs(SeHw_EvR2, 2*pi*f);
El trazado de
(
), se realiza mediante,
» semilogx(f, SeHw_EvR2_f); grid
» xlabel([
'\itf '
,
'\rm('
,
'\itHz'
,
'\rm)'
])
» ylabel([
'\itS_{R_2}^A'
,
'\rm('
,
'\itjw'
,
'\rm)_{dB}'
])
Como puede apreciarse de la figura 9 los mayores valores de
(
) para esta configuración de
circuito pasobanda se produce precisamente en el entorno de f
0
, pudiendo variar desde +2.842 dB
para 914.3 Hz hasta -1.544 dB a 1.117 kHz. En frecuencias muy por debajo de f
0
esta
sensibilidad tiende a permanecer constante con aproximadamente 0.8777 dB, mientras que para
frecuencias muy por encima de f
0
tiende a cero.
Figura 9. Trazado de la sensibilidad de la respuesta de magnitud-frecuencias para el filtro
MFB del ejemplo 2cuando se modifica R
2
con el 10 % de tolerancia.
10
2
10
3
10
4
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
3
X: 914.3
Y: 2.842
f (Hz)
S
R
2
A
(w
)
dB
X: 1117
Y: -1.544
31
Para determinar cómo se modifica la respuesta de magnitud-frecuencias con las variaciones de
R
2
en un 10 % alrededor de su valor nominal debe trazarse A(
)
dB
±
() . Para ello
primeramente es necesario obtener la respuesta de magnitud-frecuencia nominal a partir de
evaluar la función de red tanto para los valores de los componentes del circuito como para los
valores de las frecuencias en los que se desea trazar esta función.
» Hs_Eval = subs(Hs);
» Hs_jw = subs(Hs_Eval, s, 1i*2*pi*f);
» Hjw_dB = 20*log10(abs(Hs_jw));
% Respuesta de magnitud nominal.
» HdBMaxR2 = Hjw_dB + SeHw_EvR2_f;
» HdBMinR2 = Hjw_dB - SeHw_EvR2_f;
Finalmente se obtiene el trazado simultáneo de la respuesta de magnitud-frecuencias nominal y
las producidas por A(
)
dB
±
() , el cual se muestra solamente para el intervalo de
frecuencias entre 800 Hz y 1.3 kHz debido a que se desea comparar con el análisis de Monte
Carlo realizado en el ejemplo anterior.
» semilogx(f, HdBMaxR2,
'r--'
);
» hold
on
» semilogx(f, HdBMinR2,
'g--'
)
» semilogx(f, Hjw_dB,
'b-'
);
» hold
off;
» grid;
» xlabel([
'\itf '
,
'\rm('
,
'\itHz'
,
'\rm)'
])
» ylabel([
'|'
,
'\itH'
,
'\rm('
,
'\itjw'
,
'\rm)|_{dB}'
])
» axis([800 1300 -10 2]);
La figura 10 muestra los tres trazados. Lo que se ha obtenido es el margen de variación de la
respuesta de magnitud-frecuencias nominal (con trazo continuo) ante las variaciones de R
2
cuando esta tiene un 10 % de tolerancia, siendo esos márgenes los que se muestran con trazo
discontinuo.
Se confirma que el resistor R
2
afecta tanto la frecuencia central de la banda de paso del filtro
como el valor de la ganancia en esta. El análisis actual arroja que para una tolerancia del 10 % el
resistor R
2
puede hacer variar el pico de resonancia desde 965 Hz con 1.675 dB hasta 1.041 kHz
con 0.0455 dB. Debe observarse que el signo de la variación es negativo lo cual coincide con la
expresión simbólica obtenida para
()
.
32
Figura 10. Margen de variación de la respuesta de magnitud-frecuencias nominal (trazo
continuo) ante las variaciones de R
2
cuando esta tiene un 10 % de tolerancia.
Pueden compararse los márgenes de variación obtenidos en el ejemplo 2 donde se realizó el
análisis de Monte Carlo del mismo circuito ante las variaciones de R
2
con un 10 % de tolerancia.
La coincidencia entre ambos métodos es elevada a pesar de la gran diferencia en procedimiento
seguida por cada uno y a que en el análisis de Monte Carlo los valores de R
2
se generan
aleatoriamente sin que pueda garantizarse que sus valores extremos dentro del margen de
tolerancia sean tomados en la realización efectuada. No obstante, las grandes ventajas del
procedimiento seguido en este ejemplo radican en que se utilizan métodos simbólicos que son de
mucha menos complejidad, en que la evaluación numérica se realiza luego de obtener las
expresiones de la sensibilidad y en que no es necesario calcular múltiples respuestas de
magnitud-frecuencia para un conjunto de los posibles valores que pueda tomar R
2
, con lo cual se
produce un gran ahorro de tiempo de cálculo y volumen de datos en memoria.
El procedimiento seguido en este ejemplo para determinar los márgenes de variación de la
respuesta de magnitud-frecuencias a partir de las expresiones de
( )
y
( )
puede
realizarse para cualquiera de los otros componentes pasivos del circuito. Ello es la base para
determinar lo que con anterioridad se denominó "componentes críticos" en el análisis de
tolerancias de una configuración de circuito dada para realizar un filtro activo. En resumen,
aquellos componentes que arrojen un mayor margen de variación deben tener menor tolerancia si
es que el margen que producen compromete el buen desempeño del filtro.
800
900
1000
1100
1200
1300
-10
-8
-6
-4
-2
0
2
X: 965
Y: 1.675
f (Hz)
|H
(jw
)|
dB
X: 1041
Y: 0.04551
33
El lector puede hacer los trazados de las respuestas de magnitud-frecuencias, con sus márgenes
de variación, para el resto de los componentes pasivos del circuito y analizar cómo influye cada
uno por separado en las desviaciones que sufre tal respuesta de frecuencias. Por ejemplo, la
figura 11 muestra las variaciones que sufre la respuesta de magnitud-frecuencias nominal debida
a las tolerancias de R
1
(a la izquierda) y C
2
(a la derecha).
Figura 11. Margen de variación de la respuesta de magnitud-frecuencias nominal (trazo
continuo) ante las variaciones de R
1
(a la izquierda) y de C
2
(a la derecha)
cuando estos tienen un 10 % de tolerancia.
Se observa que R
1
solamente modifica la ganancia del filtro negativamente, pues forma un
divisor de voltaje a la entrada del filtro, por lo que un valor elevado de tolerancia para este
resistor no compromete ni la frecuencia, f
0
, ni el factor de calidad, Q, del filtro. Por el contrario
C
2
, dado que es una de las vías de realimentación del circuito al igual que R
2
, influye tanto en la
ganancia como en la frecuencia central de la banda de paso, debiendo reservarse para él
componentes de menor tolerancia.
Cuando todos los componentes del circuito se desvían de su valor nominal, considerando que tal
desviación es una variable aleatoria independiente para cada componente con valor medio cero y
desviación estándar igual para todos los componentes, la desviación estándar de la sensibilidad
total de la respuesta de magnitud-frecuencias, , debida a todos los P componentes del circuito,
x, es la raíz cuadrada de la suma cuadrática (RSS: Root Sum Square) de las sensibilidades de la
respuesta de magnitud-frecuencias debidas a todos los componentes del circuito, esto es,
=
()
,
(30)
800
900
1000
1100
1200
1300
-10
-8
-6
-4
-2
0
2
f (Hz)
|H
(jw
)|
dB
Variaciones debidas a R
1
.
800
900
1000
1100
1200
1300
-10
-8
-6
-4
-2
0
2
f (Hz)
|H
(jw
)|
dB
Variaciones debidas a C
2
.
34
siendo la desviación estándar de los valores de los componentes, dada por
/ , lo cual es la
tolerancia de estos asumiendo que todos los componentes tienen la misma tolerancia, mientras
que
()
es la suma de los cuadrados de las sensibilidades debidas a cada uno de los
componentes del circuito que afectan la sensibilidad (Jurisic, 2014).
Debe observar que dado que la suma es cuadrática aquellas sensibilidades de componentes
iguales que poseen signo negativo se añaden positivamente en el cálculo de la sensibilidad total.
Es por ello que mientras más componentes tiene un circuito mayor puede ser su sensibilidad.
Expresiones semejantes pueden encontrarse para el cálculo de la sensibilidad total de las
respuestas de fase-frecuencia, demora de grupo-frecuencias o incluso las respuestas transitorias
de una configuración de filtro activo.
Ejemplo 6
Para la configuración de circuito MFB realizada en los ejemplos anteriores con frecuencia
central de la banda de paso en f
0
= 1 kHz y ancho de banda
f = 200 Hz, trace la función de
sensibilidad de la respuesta de magnitud-frecuencias ante las variaciones simultáneas de todos
los componentes pasivos del circuito si estos varían con un 10 % de tolerancia alrededor de sus
respectivos valores nominales. Muestre también la respuesta de magnitud-frecuencias del filtro
con las desviaciones que tienen lugar cuando varían todos los componentes pasivos con la
tolerancia indicada.
El cálculo de la sensibilidad del numerador y denominador, así como de la respuesta de
magnitud-frecuencias, con respecto al resto de los componentes que no se utilizaron en el
ejemplo anterior es como sigue.
» SeNumMagR1 = simple(diff(MagnNum, R1) * R1/MagnNum);
» SeDenMagR1 = simple(diff(MagnDen, R1) * R1/MagnDen);
» SeMagHw_R1 = SeNumMagR1 SeDenMagR1;
» SeNumMagR3 = simple(diff(MagnNum, R3) * R3/MagnNum);
» SeDenMagR3 = simple(diff(MagnDen, R3) * R3/MagnDen);
» SeMagHw_R3 = SeNumMagR3 - SeDenMagR3;
» SeNumMagR4 = simple(diff(MagnNum, R4) * R4/MagnNum);
» SeDenMagR4 = simple(diff(MagnDen, R4) * R4/MagnDen);
» SeMagHw_R4 = SeNumMagR4 - SeDenMagR4;
» SeNumMagC1 = simple(diff(MagnNum, C1) * C1/MagnNum);
» SeDenMagC1 = simple(diff(MagnDen, C1) * C1/MagnDen);
» SeMagHw_C1 = SeNumMagC1 - SeDenMagC1;
» SeNumMagC2 = simple(diff(MagnNum, C2) * C2/MagnNum);
» SeDenMagC2 = simple(diff(MagnDen, C2) * C2/MagnDen);
» SeMagHw_C2 = SeNumMagC2 - SeDenMagC2;
35
De los resultados anteriores puede calcularse
()
como sigue.
» SeMagHw = sqrt(SeMagHw_R1^2 + SeMagHw_R2^2 + SeMagHw_R3^2 +
...
SeMagHw_C1^2 + SeMagHw_C2^2);
El paso siguiente es evaluar la expresión de la sensibilidad total de la respuesta de magnitud-
frecuencias a todos los componentes del circuito y hacer su trazado en frecuencias como en el
ejemplo anterior, obteniéndose el resultado de la figura 12.
Figura 12. Sensibilidad total de la respuesta de magnitud-frecuencias a todos los
componentes del circuito cuando estos tienen un 10 % de tolerancia.
La sensibilidad total de la respuesta de magnitud-frecuencias tiene un comportamiento próximo
al simétrico alrededor de la frecuencia central de la banda de paso, que es también la frecuencia
del par de polos de la función de red.
Al igual que sucede para los componentes individuales la mayor sensibilidad se concentra
alrededor de f
0
, pudiendo llegar la desviación absoluta en esta configuración de circuito hasta
casi 5 dB con respecto a la respuesta nominal cuando las tolerancias son del 10 % en todos los
componentes. A partir de este resultado se obtienen los márgenes de variación que se muestran
en la figura 13. Debajo se muestra una ampliación del entorno de la frecuencia central de la
banda de paso.
10
2
10
3
10
4
1
1.5
2
2.5
3
3.5
4
4.5
5
f (Hz)
S
x
k
A
(w
)
dB
36
Figura 13. Márgenes de variación de la respuesta de magnitud-frecuencias debido a
variaciones de los componentes pasivos del circuito con un 10 % de tolerancia.
Algunas herramientas computacionales realizan el análisis de Monte Carlo de filtros activos y se
reconoce (Yang, 2006) que los dos principales caminos para valorar el desempeño de un circuito
lo constituyen el que utiliza herramientas de simulación de circuitos y el basado en algoritmos
simbólicos. Por ejemplo, una de las herramientas de simulación de circuitos es el Iowa Hills
800
900
1000
1100
1200
1300
-3
-2
-1
0
1
2
3
4
X: 948
Y: 3.121
f (Hz)
H
(jw
)
dB
X: 1054
Y: 2.318
10
2
10
3
10
4
-40
-35
-30
-25
-20
-15
-10
-5
0
5
f (Hz)
H
(jw
)
dB
37
OpAmp Filter Designer (Versión. 2.2); este, para una configuración MFB que realiza un par de
polos con igual especificaciones a las utilizadas en los ejemplos anteriores, muestra el resultado
de la figura 14. La diferencia entre los resultados del ejemplo anterior y esta herramienta radica
en que aquí se utiliza para los resistores valores comerciales con tolerancia del 10 % y no valores
exactos con tolerancia del 10 % como se realizó en los ejemplos.
Figura 14. Análisis de Monte Carlo realizado por la herramienta Iowa Hills OpAmp Filter
Designer para la respuesta de magnitud-frecuencias del filtro activo realizado
en el ejemplo 2 cuando los componentes pasivos del circuito tienen un 10 % de
tolerancia.
Se ha podido verificar la utilidad del cálculo de la sensibilidad de la respuesta de magnitud-
frecuencia por medio de métodos simbólicos para hacer estudios de tolerancia de los
componentes de una configuración de filtro activo. El procedimiento seguido para ello es una
38
provechosa alternativa, o tal vez complemento, al análisis de Monte Carlo. Como herramienta
computacional se ha utilizado Matlab, demostrándose su gran potencialidad combinando
procedimientos simbólicos y numéricos.
Como es de esperar, la expresión de la función de red que se utilice de partida en este método
determina las posibilidades del análisis. Por ejemplo, si dicha función también incluye entre sus
parámetros la ganancia en lazo abierto de los amplificadores operacionales, esta también puede
ser tenida en cuenta en el análisis. Otros aspectos que pueden ser analizados ante la tolerancia de
los componentes del filtro son las sensibilidades de las respuestas de fase y demora de grupo
contra frecuencias, así como las de las respuestas transitorias ante un impulso o un escalón, para
lo cual es necesario deducir las expresiones de la sensibilidad siguiendo un procedimiento
semejante al explicado para las respuestas de magnitud contra frecuencias.
No está de más aclarar que pueden valorarse magnitudes de tolerancia diferente para los distintos
componentes del circuito haciendo reformas mínimas al procedimiento descrito.
8. Conclusiones
En el mundo competitivo actual la confiabilidad de un dispositivo electrónico es un aspecto a no
descuidar. Dado que la tolerancia afecta tanto la calidad como el costo de los circuitos
electrónicos, el tema de la sensibilidad del desempeño de un circuito a las variaciones que sufren
los valores nominales de sus componentes se considera un tema crítico de la ingeniería, el cual
requiere considerable atención. Los diseñadores usualmente especifican pequeños valores de
tolerancia para garantizar máxima calidad, pero los productores prefieren generalmente reducir
los costos utilizando mayores tolerancias. Con el fin de conciliar ambas posiciones en un filtro
activo han tomado auge los estudios de sensibilidad y tolerancia; no obstante, la forma
tradicional, si bien es eficaz, resulta generalmente soslayada por su complejidad, o es sustituida
por métodos de ensayo y error, generalmente costosos e ineficaces.
En este trabajo se ha mostrado la gran potencialidad de los métodos simbólicos, abordados con
las herramientas de Matlab, para el análisis de la sensibilidad de los filtros activos a la tolerancia
de sus componentes. Los procedimientos descritos desde la perspectiva simbólica pueden
sistematizarse para cualquier configuración de 2do orden de filtro activo con solo ligeras
modificaciones que dependen de la forma que tenga la propia función de red en dependencia del
tipo de respuesta de frecuencias del filtro. Por medio de métodos simbólicos puede partirse del
planteamiento del sistema de ecuaciones de nodo del filtro (ver anexo 2) y determinar las
soluciones para sus incógnitas, de las cuales se extrae la relación entre el nodo de salida y el de
entrada. Disponiendo de la función de red pueden obtenerse, igualmente por métodos simbólicos,
las ecuaciones de sus coeficientes y con ellas las de sus parámetros (
z
,
p
, Q y G), los cuales
pueden ser evaluados para los valores de los componentes del circuito y determinar sus
respuestas. Por el contrario, disponiendo de las ecuaciones de los parámetros puede utilizarse la
vía simbólica para obtener las expresiones de realización que permiten obtener los valores de los
componentes a partir de los valores de los parámetros que necesita la respuesta deseada.
39
Por otra parte, se ha mostrado la alternativa simbólica para determinar la sensibilidad de una
respuesta del filtro ante las variaciones de uno o todos los componentes del mismo. Los métodos
clásicos de análisis de la sensibilidad de parámetros se basan en expresiones analíticas que
devuelven un valor numérico y no la forma en que el parámetro varía con la frecuencia. El
análisis de la sensibilidad basada en el método de Monte Carlo obtiene cómo varía una respuesta
del filtro ante las modificaciones de uno o más componentes del circuito, pero requiere de gran
número de corridas; no obstante, es la más aceptada y difundida desde el punto de vista
estadístico. Por su parte, los métodos basados en el peor caso conducen a una sobreestimación de
la sensibilidad ya que la combinación de parámetros que puede conducir al peor caso es muy
poco probable, es por ello que generalmente el análisis de peor caso se lleva a cabo mediante
análisis de Monte Carlo para determinar variaciones extremas de las respuestas.
La alternativa mostrada ofrece una vía muy práctica y segura ya que al basarse en el método
simbólico no requiere de la realización de cálculos numéricos intermedios para brindar el margen
de variación de la respuesta debida a la tolerancia de los componentes. El método simbólico se
basa en construir un modelo seguro y eficiente del circuito y su solución utiliza métodos
matemáticos y no numéricos; además, el modelo simbólico del circuito puede ser reutilizado con
diversos fines, incluyendo disímiles manipulaciones matemáticas o múltiples evaluaciones
numéricas.
Cuando el análisis de la sensibilidad se realiza en el dominio de la frecuencia no puede conocerse
cómo se afecta la respuesta en el tiempo del filtro ante un estímulo determinado si sus
componentes presentan desviaciones de sus valores nominales debidas a la tolerancia. Es por ello
que los análisis de la sensibilidad, de la forma presentada en este trabajo, pueden llevarse a cabo
también en el dominio del tiempo, tanto para realizar análisis transitorio (transient analyses) que
permite conocer la respuesta en el tiempo del filtro durante el estado transitorio inmediatamente
después de aplicar algún estímulo, como para realizar análisis de estado estable (steady state
analyses) para conocer la respuesta ante un estímulo determinado después de desaparecido el
estado transitorio. Para ello igualmente se parte de la función de red obtenida por el método
simbólico y se obtienen las respuestas en el tiempo deseadas mediante transformada de Laplace
inversa, igualmente mediante el método simbólico.
9. Referencias
Erdei, Z. (2007). The comparison between OrCAD and Matlab on tolerance analysis for analog circuit.
Paper presented at the 7th International Multidisciplinary Conference, Baia Mare, Romania.
Fitzpatrick, D. (2012). Analog Design and Simulation using OrCAD Capture and PSpice: Elsevier.
Hayes, M. J., Tadeo, F., & Salazar, J. (2010). Evaluation of the worst-case performance of active filters
using robust control ideas. International Journal of Sciences and Techniques of Automatic
Control & Computer Engineering, 4(2), 1338-1353.
40
Jurisic, D. (2014). Low-noise, low-sensitivity active-RC allpole filters using Matlab optimization. In T.
Michalowski (Ed.), Applications of MATLAB in Science and Engineering: InTech.
Jurisic, D., & Mijat, N. (2005). Low-Sensitivity, Low-Noise, Band-Rejection and All-Pass Active-RC
Filters. Paper presented at the IEEE ISIE, Dubrovnik, Croatia.
Jurisic, D., Moschytz, G. S., & Mijat, N. (2001). Low-sensitivity SAB Band-pass Active-RC Filter Using
Impedance Tapering. Paper presented at the The 2001 IEEE International Symposium on Circuits
and Systems, ISCAS 2001.
Jurisic, D., Moschytz, G. S., & Mijat, N. (2002). Low-sensitivity active-RC high and band-pass second-
order Sallen & Key allpole filters. Paper presented at the IEEE International Symposium on
Circuits and Systems, ISCAS 2002.
Kolev, L. (2002). Worst-case tolerance analysis of linear DC and AC electric circuits. IEEE Transactions
on Circuits and Systems I, Fundamental Theory and Applications, 49(12), 1693-1701.
Mandache, L., Iordache, M., & Dumitriu, L. (2010). Sensitivity and Tolerance Analysis in Analog
Circuits using Symbolic Methods. Paper presented at the 10th International Conference on
DEVELOPMENT AND APPLICATION SYSTEMS, Suceava, Romania.
MathWorks. (2002). Symbolic Math Toolbox, User's Guide (Vol. 2).
Moschytz, G. S. (1999). Low-sensitivity, low-power active-RC allpole filters using impedance tapering.
IEEE Transactions on Circuits and Systems II: Analog and Digital Signal Processing, 46(8),
1009-1026.
Moschytz, G. S. (2002). Trade-offs in sensitivity, component spread and component tolerance in active
filter design. In C. T. e. al. (Ed.), Trade-Offs in Analog Circuit Design: The Designer's
Companion (pp. 315-339). Netherlands: Kluwer Academic Publishers.
Palma-Rodriguez, A. A., Tlelo-Cuautle, E., Rodriguez-Chavez, S., & Tan, S. X. D. (2012). DDD-Based
Symbolic Sensitivity Analysis of Active Filters. Paper presented at the 8th International Caribbean
Conference on Devices, Circuts and Systems (ICCDCS).
Raut, R., & Swamy, M. N. S. (2010). Modern Analog Filter Analysis and Design. A practical approach:
Wiley VCH Verlag GmbH & Co. KGaA.
Shujuan, W., Zhiping, W., & Hongliang, G. (2005). The research on tolerance design and second-design
for optimizing parameter in electronic circuit. School of Engineering & Automation, Harbin
Institute of Technology, Harbin 150001, China.
Yang, H. (2006). Symbolic Sensitivity Analysis Techniques and Applications in Analog Circuit Synthesis.
(PhD), Cincinnati.
41
Anexo 1
Algunas funciones del Symbolic Math Toolbox de Matlab (R2010a)
% Basic operations
pretty
Pretty-print symbolic expressions.
syms / sym
Creates symbolic variables and expressions.
symvar
Find symbolic variables in symbolic expression or matrix.
% Calculus
det
Compute determinant of symbolic matrix.
diff
Differentiate symbolic expression.
inv
Compute symbolic matrix inverse.
limit
Compute limit of symbolic expression.
% Conversions
poly2sym
Polynomial coefficient vector to symbolic polynomial.
sym2poly
Symbolic-to-numeric polynomial conversion.
% Simplifying Symbolic Expressions
coeffs
List coefficients of multivariate polynomial.
collect
Collect coefficients.
expand
Symbolic expansion of polynomials and elementary functions.
factor
Factorization.
horner
Horner nested polynomial representation.
numden
Numerator and denominator.
simple
Search for simplest form of symbolic expression.
simplify
Symbolic simplification.
subexpr
Rewrite symbolic expression in terms of common subexpressions.
subs
Symbolic substitution in symbolic expression or matrix.
% Solution of Equations
compose
Functional composition.
solve
Symbolic solution of algebraic equations.
% Special Functions
dirac
Dirac delta.
heaviside
Compute Heaviside step function.
42
% Plotting tools
ezplot
Function plotter.
ezplot3
3-D parametric curve plotter.
% Transforms
fourier
Fourier integral transform.
ifourier
Inverse Fourier integral transform.
ilaplace
Inverse
Laplace
transform.
laplace
Laplace
transform.
43
Anexo 2
Ecuaciones de nodo para algunas secciones de 2do orden
Siglas identificadoras del tipo de red, su función y respuesta de frecuencias:
SAF (Single Amplifier Filter):
Realiza funciones monocuadráticas (sin ceros finitos).
SAN (Single Amplifier Notch): Realiza funciones de hendidura.
SAB (Single Amplifier Biquad): Realiza funciones bicuadráticas (con ceros finitos).
TAF (Two Amplifier Filter):
Realiza funciones monocuadráticas (sin ceros finitos).
TAB (Two Amplifier Biquad): Realiza funciones bicuadráticas (con ceros finitos).
TAN (Two Amplifier Notch):
Realiza funciones de hendidura.
MAF (Multi-Amplif. Filter):
Realiza funciones monocuadráticas (sin ceros finitos).
MAB (Multi-Amplif. Biquad):
Realiza funciones bicuadráticas (con ceros finitos).
LPF (Low-Pass Filter):
Respuestas de magnitud-frec. pasobajo (sin ceros finitos).
LPN (Low-Pass Notch):
Respuestas de magnitud-frec. pasobajo (con ceros finitos).
HPF (High-Pass Filter):
Respuestas de magnitud-frec. pasoalto (sin ceros finitos).
HPN (High-Pass Notch):
Respuestas de magnitud-frec. pasoalto (con ceros finitos).
BPF (Band-Pass Filter):
Respuestas de magnitud-frec. pasobanda.
NF (Notch Filter):
Respuestas de magnitud-frec. de hendidura.
UAF (Universal Active Filter): Más de dos tipos de respuesta de magnitud-frecuencias.
1. Deliyannis (SAF BPF)
Relaciones: V
2
= V
3
V
BP
=
Nodo (1): V
1
(1/R
1
+ sC
1
+ sC
2
) V
2
(sC
1
) V
BP
(sC
2
) = V
i
(1/R
1
).
Nodo (2): V
1
(sC
1
) + V
2
(1/R
2
+ sC
1
) V
BP
(1/R
2
) = 0.
Nodo (3): V
2
(K + 1) V
BP
(K) = 0
V
i
+
C
1
R
2
+V
BP
C
2
R
3
R
1
+
KR
3
(1)
(2)
(3)
44
2. Friend (SAB LPN)
Relación:
V
o
= A(V
1
V
2
), siendo A la ganancia en lazo abierto del AOp (A
)
Nodo (1): V
1
(1/R
a
+ 1/R
b
+ 1/R
c
) V
o
(1/R
b
) = V
i
(1/R
c
)
Nodo (2): V
2
(1/R
2
+ 1/R
7
+ sC
1
) V
3
(sC
1
) V
o
(1/R
2
) = 0
Nodo (3): V
2
(sC
1
) + V
3
(1/R
4
+ 1/R
5
+ sC
1
+ sC
2
) V
o
(sC
2
) = V
o
(1/R
4
)
3. Friend (SAB HPN)
Relación:
V
o
= A(V
1
V
2
), siendo A la ganancia en lazo abierto del AOp (A
)
Nodo (1): V
1
(1/R
a
+ 1/R
b
+ 1/R
c
) V
o
(1/R
b
) = V
i
(1/R
c
)
Nodo (2): V
2
(1/R
2
+ 1/R
6
+ sC
1
) V
3
(sC
1
) V
o
(1/R
2
) = V
i
(1/R
6
)
Nodo (3): V
2
(sC
1
) + V
3
(1/R
4
+ 1/R
5
+ sC
1
+ sC
2
) V
o
(sC
2
) = V
o
(1/R
4
)
(1)
(2)
(3)
V
i
+
C
1
R
2
+V
o
C
2
R
b
R
4
+
R
c
R
5
R
7
R
a
(1)
(2)
(3)
V
i
+
C
1
R
2
+V
o
C
2
R
b
R
4
+
R
c
R
5
R
7
R
a
45
4. Twin-T (SAN NF)
Relación:
V
N
= KV
3
, siendo K = 1 + R
f
/R
g
Nodo (1): V
1
(2/R + s2C) V
3
(sC) V
N
(2/R) = V
i
(sC)
Nodo (2): V
2
(2/R + s2C) V
3
(1/R) = V
i
(1/R)
Nodo (3): V
1
(sC) V
2
(1/R) + V
3
(1/R + sC) = 0
Nodo (4): KV
3
V
N
= 0
5. Fliege (TAF LPF)
Relación: V
o
= A(V
1
V
2
), siendo A la ganancia en lazo abierto de los AOp (A
)
Nodo (1): V
1
(1/R
5
+ 1/R
6
+ sC
5
) V
2
(A/R
5
+ sAC
5
) V
3
(A/R
5
+ sAC
5
) = V
i
(1/R
6
)
Nodo (2): V
2
(1/R
4
+ A/R
4
+ sC
3
) V
3
(A/R
4
) V
o
(sC
3
) = 0
Nodo (3): V
3
(1/R
1
+ 1/R
2
) V
o
(1/R
2
) = 0
(1)
(2)
(3)
V
i
+
C
R
+
+V
N
C
R
f
R/2
R
2C
R
g
(1)
(2)
(3)
V
i
+
R
4
+
+V
o
C
3
R
2
R
1
R
5
R
6
+
C
5
46
6. Fliege (TAF HPF)
Relación: V
o
= A(V
1
V
2
), siendo A la ganancia en lazo abierto de los AOp (A
)
Nodo (1): V
1
(1/R
5
+ 1/R
6
+ sC
6
) + V
2
(A/R
5
) V
3
(A/R
5
) = V
i
(sC
6
)
Nodo (2): V
2
(1/R
3
+ sC
4
+ sAC
4
) V
3
(sAC
4
) V
o
(1/R
3
) = 0
Nodo (3): V
3
(1/R
1
+ 1/R
2
) V
o
(1/R
2
) = 0
7. Fliege (TAB LPN)
Relación: V
o
= A(V
1
V
2
), siendo A la ganancia en lazo abierto de los AOp (A
)
Nodo (1): V
1
(1/R
6
+ sC
5
) + V
2
(sAC
5
) V
3
(sAC
5
) = V
i
(1/R
6
)
Nodo (2): V
2
(1/R
3
+ 1/R
4
+ A/R
4
) V
3
(A/R
4
) V
o
(1/R
3
) = 0
Nodo (3): V
3
(1/R
1
+ 1/R
2
+ sC
1
) V
o
(1/R
2
) = V
i
(sC
1
)
(1)
(2)
(3)
V
i
+
R
3
+
+V
o
C
4
R
2
R
1
R
5
R
6
+
C
6
V
i
+
R
3
+
+V
o
C
5
R
4
R
6
+
R
1
C
1
R
2
(1)
(2)
(3)
47
8. Gray-Meyer (TAB LPN/HPN)
Relación: V
o
= A(V
1
V
2
), siendo A la ganancia en lazo abierto de los AOp (A
)
Nodo (1): V
1
(1/R
5
+ 1/R
6
) + V
2
(A/R
5
) V
3
(A/R
5
) = V
i
(1/R
6
)
Nodo (2): V
2
(1/R
4
+ A/R
4
+ sC
3
) V
3
(A/R
4
) V
o
(sC
3
) = 0
Nodo (3): V
3
(1/R
1
+ 1/R
2
+ sC
1
) V
o
(1/R
2
) = V
i
(sC
1
)
9. Twin-T (TAB HPN)
Relaciones: V
N
= V
1
V
4
=
= KV
N
,
siendo K =
R = R
1
|| R
2
Nodo (1): V
2
(sC) V
3
(1/R) + V
N
(1/R + sC) = 0
Nodo (2): V
2
(2/R + s2C) V
N
(2K/R + sC) = V
i
(sC)
Nodo (3): V
3
(2/R + s2C) V
N
(1/R + s2KC) = V
i
(1/R
1
)
(1)
(2)
(3)
(4)
V
i
+
C
R
+
+V
N
C
R
f
R
g
R/2
R
1
+
2C
R
2
V
i
+
R
5
+
+V
o
C
3
R
4
R
6
+
R
1
C
1
R
2
(1)
(2)
(3)
48
10. Twin-T (TAN NF)
Relaciones: V
N
= V
1
V
4
=
= KV
N
,
siendo K =
Nodo (1): V
2
(sC) V
3
(1/R) + V
N
(1/R + sC) = 0
Nodo (2): V
2
(2/R + s2C) V
N
(2K/R + sC) = V
i
(sC)
Nodo (3): V
3
(2/R + s2C) V
N
(1/R + s2KC) = V
i
(1/R)
11. Bainter (MAB LPN/HPN)
Relaciones: V
o
= KV
3
,
siendo K =
Nodo (1): V
1
(1/R
1
+ 1/R
2
+ A/R
2
) = V
i
(1/R
1
)
Nodo (2): V
1
(A/R
3
) + V
2
(1/R
3
+ 1/R
4
+ sC
1
+ sAC
1
) V
o
(1/R
4
) = 0
Nodo (3): V
2
(A/R
5
) + V
3
(1/R
5
+ 1/R
6
+ sC
2
) = V
i
(sC
2
)
V
i
+
R
5
+
+V
o
C
1
R
6
R
8
R
1
R
2
R
3
+
+
C
2
R
7
R
4
(1)
(2)
(3)
(1)
(2)
(3)
(4)
V
i
+
C
R
+
+V
N
C
R
f
R
g
R/2
R
+
2C
49
12. State Variable (MAB UAF)
Relaciones: V
1
=
, V
2
= 0 y V
3
= 0
Nodo (1): V
1
(1/R
1
+ 2/R
2
) V
LP
(1/R
2
) V
HP
(1/R
2
) = V
i
(1/R
1
)
Nodo (2): V
HP
(1/R
2
) V
BP
(sC) = 0
Nodo (3): V
BP
(1/R
2
) V
LP
(sC) = 0
13. Kerwing-Huelsman-Newcomb (MAB UAF)
Relaciones: V
3
= 0, V
4
= 0 y V
1
= V
2
Nodo (1): V
1
(1/R
3
+ 1/R
4
) V
BP
(1/R
4
) = V
i
(1/R
3
)
Nodo (2): V
2
(1/R
5
+ 1/R
6
) V
HP
(1/R
6
) V
LP
(1/R
5
) = 0
Nodo (3): V
HP
(1/R
4
) V
BP
(sC
1
) = 0
Nodo (4): V
BP
(1/R
2
) V
LP
(sC
2
) = 0
+V
LP
+V
i
C
1
R
1
+
+
+
+V
BP
+V
HP
C
2
R
2
R
3
R
4
R
5
R
6
(1)
(2)
(3)
(4)
+V
LP
V
i
+
C
R
2
+
+
+
+V
BP
+V
HP
C
R
2
R
3
R
4
R
2
R
2
(1)
(2)
(3)
R
1
50
14. Taw-Thomas (MAB LPF)
Relaciones: V
o
= AV
1
, siendo A la ganancia en lazo abierto de los AOp (A
)
Nodo (1): V
1
(1/R
2
+ 1/R
3
+ sC
1
) V
3
(A/R
3
) V
o
(1/R
2
+ sC
1
) = 0
Nodo (2): V
2
(1/R
2
+ 1/R
4
+ sC
2
+ sAC
2
) V
o
(1/R
4
) = V
i
(1/R
2
)
Nodo (3): V
2
(A/R
5
) + V
3
(1/R
5
+ 1/R
6
+ A/R
6
) = 0
15. Akerberg-Mossberg (MAF LPF/BPF)
Relaciones: V
BP
= AV
1
, siendo A la ganancia en lazo abierto de los AOp (A
)
V
LP
= AV
2
Nodo (1): V
1
(1/R
1
+ 1/R
2
+ 1/R
4
+ sC
1
) V
LP
(1/R
2
) V
BP
(1/R
1
+ sC
1
) = V
i
(1/R
4
)
Nodo (2): V
2
(1/R
3
+ sC
2
) V
LP
(sC
2
) V
BP
(1/R
3
) = 0
(1)
(3)
(2)
V
i
+
C
2
R
4
+
+
+
+ V
0
C
1
R
5
R
6
R
3
R
2
R
1
(1)
(2)
C
2
R
4
+
+
+ V
BP
C
1
R
3
R
2
R
1
V
i
+
R
+V
LP
R
+
Final del extracto de 50 páginas
- Citar trabajo
- Rubén Orozco-Morales (Autor)I. Moreno-Campdesuñer (Autor), 2015, Sensibilidad y Análisis de Tolerancia en Filtros Activos desde la Perspectiva Simbólica, Múnich, GRIN Verlag, https://www.grin.com/document/310018
Textos similares


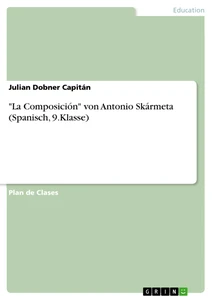
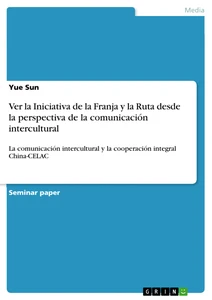
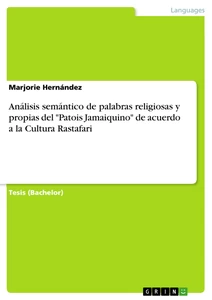

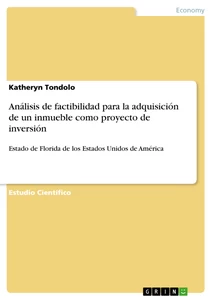

Así es como funciona
✕
Extracto de
50
Páginas


Comentarios