Excerpt
Arbeitsbereich Technische Informatik I
D I P L O M A R B E I T
Sven Utcke
Transfer and Invariants of
Surfaces of Revolution
Erstellt in Zusammenarbeit mit
UNIVERSITY OF OXFORD
Department of Engineering Science
1
February 7, 2001
Transfer and Invariants of Surfaces of Revolution
0.1
Introduction
A number of recent papers in the Computer Vision and Pattern Recognition
literature have demonstrated that invariants, or equivalently structure mod-
ulo a 3D linear transformation, are sufficient for object recognition [1, 19, 20].
The final stage in the recognition process is verification, where an outline is
transferred
from an acquisition image of the object to the target image.
For the most part recognition based on invariants has concentrated on planar
objects [19], though recently 3D invariants have been measured from single
and multiple images for polyhedra [18], point sets [9, 13, 18], surfaces of
revolution [12] and algebraic surfaces [11]. The work so far on surfaces of
revolution has only exploited isolated points on the outline (such as bitan-
gents), and has not addressed transfer or verification.
The aim of this project is to extend the transfer and extraction of invariants
to surfaces of revolution using the entire outline.
0.2
Specification
A surface of revolution is simply a rotated generating curve. There are two
related goals for the project:
1. Transfer: Given a single (or multiple) views of the surface, obtain
the projection in any other given view. For example, after specifying a
2
minimal number of points in the target image, render the object from
that viewpoint.
2. Invariants: Extract from the outline in a single view a signature or
set of invariants which are viewpoint independent. These should also
be derived directly from the generating curve.
The project will be developed in a number of stages. In the first place the
affine approximation to projection will be employed (so that the object is
imaged under parallel projection). This has the virtue that the essential ge-
ometry of the contour generator depends only on one parameter - the direc-
tion of projection. The second stage will investigate perspective projection,
where (two) parameters specifying the optical center must be considered.
The analysis will be partly theoretical - employing the symbolic algebra pack-
age Mathematica, and partly experimental. The goal is to develop methods
that work reliably and robustly on images of real objects.
0.3
Relevant Literature
Papers listed below on the application of invariants to model based recogni-
tion. Also background texts on projective geometry [16, 22, 24] and differ-
ential geometry [8, 15, 21].
Referent:
Prof. Dr.-Ing. H. Burkhardt
Betreuer:
Dr. A. Zisserman (University of Oxford)
Ausgabedatum:
01.08.1993
Abgabedatum:
31.01.1993
Bearbeitungszeit:
6 Monate
...
Prof. Dr.-Ing. H. Burkhardt
3
This thesis is entirely my own work and, except where otherwise stated,
describes my own research.
Oxford, February 7, 2001
Contents
0.1
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
0.2
Specification . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
0.3
Relevant Literature . . . . . . . . . . . . . . . . . . . . . . . .
2
1
Introduction
7
1.1
The Object Class of Interest
. . . . . . . . . . . . . . . . . .
8
1.2
The Task . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
1.3
The Chosen Imaging Geometry
. . . . . . . . . . . . . . . . 11
1.4
Contributions of this Thesis
. . . . . . . . . . . . . . . . . . 12
1.5
Outline of this Thesis . . . . . . . . . . . . . . . . . . . . . . 13
2
Distinguished features
14
2.1
Tangents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.1.1
The Tangent Cone
. . . . . . . . . . . . . . . . . . . 16
2.1.2
The Outline . . . . . . . . . . . . . . . . . . . . . . . 16
2.2
The Affine Basis . . . . . . . . . . . . . . . . . . . . . . . . . 19
3
The Weak Perspective Camera
21
3.1
The underlying Geometry
. . . . . . . . . . . . . . . . . . . 22
3.1.1
The Surface of Revolution
. . . . . . . . . . . . . . . 22
3.1.2
The Weak Perspective Camera . . . . . . . . . . . . . 23
3.1.3
Recovering the Generating Function . . . . . . . . . . 26
4
CONTENTS
5
3.1.4
How to calculate the viewing direction
. . . . . . . . 28
3.1.5
Transfer using two arbitrary views . . . . . . . . . . . 28
3.2
Method 1. Using the Generating Curve . . . . . . . . . . . . 30
3.2.1
Summary
. . . . . . . . . . . . . . . . . . . . . . . . 30
3.2.2
The Implementation
. . . . . . . . . . . . . . . . . . 31
3.2.3
Results . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.3
Method 2. Using the Outline's Envelope
. . . . . . . . . . . 37
3.3.1
The underlying Geometry
. . . . . . . . . . . . . . . 37
3.3.2
The Implementation
. . . . . . . . . . . . . . . . . . 39
3.3.3
Results . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.4
Comparing the two Methods . . . . . . . . . . . . . . . . . . 45
3.5
Affine Extensions
. . . . . . . . . . . . . . . . . . . . . . . . 46
3.5.1
Unknown Aspect Ratio . . . . . . . . . . . . . . . . . 46
3.5.2
Full Affine Distortions
. . . . . . . . . . . . . . . . . 47
4
The Affine Camera
49
4.1
Theoretical Background . . . . . . . . . . . . . . . . . . . . . 50
4.1.1
The Affine Camera
. . . . . . . . . . . . . . . . . . . 50
4.1.2
The Surface's 3D Geometry and its Image
. . . . . . 51
4.1.3
Acquisition -- Calculating the Conics . . . . . . . . . 52
4.1.4
Transfer
. . . . . . . . . . . . . . . . . . . . . . . . . 53
4.1.5
Summary
. . . . . . . . . . . . . . . . . . . . . . . . 56
4.2
Implementation
. . . . . . . . . . . . . . . . . . . . . . . . . 58
4.2.1
The Common Frame
. . . . . . . . . . . . . . . . . . 58
4.2.2
The Acquisition . . . . . . . . . . . . . . . . . . . . . 59
4.2.3
Transfer
. . . . . . . . . . . . . . . . . . . . . . . . . 62
4.3
Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
CONTENTS
6
4.4
Possible Enhancements and Open Questions
. . . . . . . . . 65
4.4.1
Better Features than Intersections . . . . . . . . . . . 65
4.4.2
Unused Constraints . . . . . . . . . . . . . . . . . . . 66
5
The Projective Camera
68
5.1
The underlying geometry . . . . . . . . . . . . . . . . . . . . 69
5.1.1
The projective Camera . . . . . . . . . . . . . . . . . 69
5.1.2
The Surface's 3D Geometry
. . . . . . . . . . . . . . 70
5.1.3
Summary
. . . . . . . . . . . . . . . . . . . . . . . . 75
5.2
A possible Implementation . . . . . . . . . . . . . . . . . . . 75
5.2.1
Acquisition
. . . . . . . . . . . . . . . . . . . . . . . 76
5.2.2
Transfer
. . . . . . . . . . . . . . . . . . . . . . . . . 77
5.2.3
Transfer into the Canonical Frame . . . . . . . . . . . 78
5.3
Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
6
Conclusions
81
6.1
A Recognition System
. . . . . . . . . . . . . . . . . . . . . 82
6.1.1
Transfer between two Views
. . . . . . . . . . . . . . 82
6.1.2
Transfer into a Canonical Frame . . . . . . . . . . . . 82
6.1.3
How to build a Recognition System
. . . . . . . . . . 83
6.2
Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
Chapter 1
Introduction
"Begin at the beginning," the King said, gravely, "and go on till
you come to the end: then stop."
Lewis Carroll, Alice in Wonderland
7
CHAPTER 1.
INTRODUCTION
8
y
x
z
f(z)
Figure 1.1: The generating curve f (z).
1.1
The Object Class of Interest
A surface of revolution results from rotating a function f (z) -- the so called
generating curve
-- around the z-axis (see figure 1.1) where the z-axis is the
axis of symmetry.
In practice, a surface of revolution is the surface of a solid, or object, of
revolution. Objects of revolution have been known to man for thousands
of years, since the invention of the potter's wheel,
1
and later the lathe, al-
lowed man to produce highly symmetric objects with ease, and today we are
surrounded by rotationally symmetric objects such as bottles, pens, vases,
glasses, lamp-shades and light-bulbs. Some of the objects of revolution found
in every household are shown in figure 1.2.
1.2
The Task
The only image feature used throughout this thesis is a surface's outline (also
called apparent contour [6], occluding contour, profile, silhouette or limb),
which is the projection of the locus of points on the surface separating the
surface's visible image from the occluded parts [6].
The outline is obtained from a grey scale raster image (see figure 1.3a) by
1
The potter's wheel was invented before 3000 bc in either Sumer or Iran, from where
it reached Greece at around 1800 bc, Italy at 750 bc, the upper Rhine basin at 400 bc,
Southern England at 50 bc and finally Scotland at 400 ad [23].
CHAPTER 1.
INTRODUCTION
9
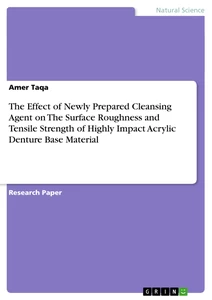
Figure 1.2: Some of the objects of revolution we encounter each day (as found
in the office).
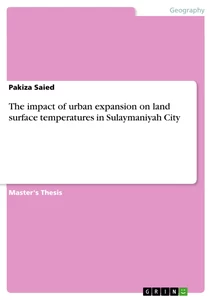
a)
b)
c)
Figure 1.3: The outline and bitangents are generated from a grey scale raster
image.
a)
The grey scale raster image.
b) The surface's outline as found from the raster image.
c)
Bitangents to the surface and conics as found from the raster image
(in black, the surface's outline is displayed in grey for easy reference).
CHAPTER 1.
INTRODUCTION
10
125
175
225
325
375
275
-50
-25
0
25
50
75
-75
a)
b)
c)
Figure 1.4: Transfer from image a) onto a second image b), and into a canon-
ical frame c) where invariants can be measured.
Figures a) and b) each show both an original grey scale image and the outline
calculated from it. Figure b) shows also the transferred outline (black).
The outlines are nearly identical (the transformation used is described in
section 3.2).
applying the simplified Canny [5] edge detector with full hysteresis, providing
both step intensity information and edge orientation [17].
Most of this thesis is concerned with:
1. The transfer from a surface's outline in one image (figure 1.4a) onto the
same surface's outline in any other given view (figure 1.4b) after specify-
ing a minimal number of points in the target image. The transfer is not
a simple plane-to-plane transformation, but is rather more complicated
(cusps can be created -- compare figure 1.4.a to 1.4.b). It should also
not be mistaken for the rendering of a known object as viewed under
a known viewing direction, as is common in computer graphics appli-
cation; in general, both the viewing directions in figures 1.4.a) and b),
and the surface's generating function, will be unknown. Nonetheless,
only very few outline points or features in the target image, such as the
top and bottom conics, are used for calculating the transfer. The fea-
tures used by the various methods are listed in table 1.1 (see also 1.5).
The transfer can be used for verification.
CHAPTER 1.
INTRODUCTION
11
Table 1.1: The features needed by the various methods for calculating the
transfer
type
bitangent pairs
conics
section 3.2
weak persp.
2
section 3.3
weak persp.
2
section 3.5
affine
3
section 4
affine
1
1
section 5
projective
1
2
conics
bitangent-pair
Figure 1.5: The maximum number of features used for the transfer. 2 bitan-
gent pairs and two conics, both shown in black, are the maximum number
of features needed for any of the methods of transfer described in this the-
sis except section 3.5 (affine extension of scaled orthographic transfer). The
outline itself is shown in grey/dotted.
2. The transfer of a surface's outline in one image (figure 1.4a) into a
so-called canonical frame (figure 1.4c). This allows the retrieval of all
or part of the generating function up to a linear transformation from
which it is then easy to calculate invariants.
1.3
The Chosen Imaging Geometry
Three different geometries are described in this thesis. Chapter 3 deals with
images taken with what is known as the weak perspective camera, the ap-
proximation of a calibrated camera at infinity by a calibrated camera where
the camerasurface distance is much greater
2
than the depth of the surface
of revolution.
2
"Much greater" means approx. 25 times for most of the examples shown throughout
this thesis.
CHAPTER 1.
INTRODUCTION
12
Figure 1.6: A weak perspective (left) and a projective image of a vase.
Note the perspective reduction of the vase's base in the right image.
Chapter 4, deals with the affine camera, an uncalibrated
3
camera at infinity
4
whose image can than be subject to any affine transformation.
5
Using the
model of an affine camera -- although without any counterpart in the real
world -- has the advantages resulting from using a group operation (the
plane affine transformations). However, images have still to be taken from
"infinity".
The last of these chapters, chapter 5, uses the projective camera, allowing
for full perspectivity as well as an uncalibrated camera. This is equivalent to
taking an image of the surface with an arbitrarily placed camera (in general
not at infinity) and than taking a second image of that image with a camera
which is again in an arbitrary position. This is obviously the most general
case and accounts for most practical situations.
Examples of both a weak perspective (left) and a projective (fully perspective,
right) image of the same surface of revolution are shown in figure 1.6.
1.4
Contributions of this Thesis
Previous work on surfaces of revolution has only exploited isolated points
on the outline (such as bitangent points), and has not addressed transfer or
verification [12]; or has attempted transfer for calibrated cameras only, using
3
Uncalibrated only includes linear (affine) distortions, and not such nonlinear distor-
tions as spherical aberration where lines do not project to lines.
4
Infinity, again, means approx. 25 times the surface of revolution's depth -- that is 5
meters!
5
This corresponds to taking an image of the image with another (uncalibrated) camera
at infinity.
CHAPTER 1.
INTRODUCTION
13
a surface's CAD-model [7].
This thesis describes a number of novel methods for transferring the entire
outline of a surface of revolution, thereby allowing easy verification as well
as the extraction of further invariants from a canonical frame without neces-
sarily requiring a calibrated camera.
The fact that only some isolated points on the outline are needed to calculate
the transfer means the methods are suitable for partly occluded surfaces.
1.5
Outline of this Thesis
The following text is divided into six major parts. All the work described in
this thesis is based on outlines and makes intensive use of so-called distin-
guished points
(as e.g. bitangent points). Chapter 2 gives a brief introduction
to the underlying geometry. Most of it is based on [12] (see also [17]). How-
ever, some familiarity with homogeneous coordinates as well as projective
geometry is assumed. Although an introduction to these subjects can be
found in most undergraduate textbooks about computer vision (e.g. [2]
6
),
or standard literature about projective geometry [22, 24] the best choice is
probably the very good appendix of [16].
The next three chapters each describe different methods of transfer for one
particular imaging geometry: weak perspective camera (or scaled ortho-
graphic projection) in chapter 3, an affine camera in chapter 4 and a projec-
tive camera in chapter 5. Each of these parts starts with a section explaining
the theoretical background, followed by a short summary, an explanation of
the actual implementation and a short section showing some of the results.
Finally chapter 6, discusses how a recognition system could be build using the
methods introduced in the previous chapters and giving possible directions
for future work.
6
Be aware that they apply transformations from the right hand rather than the left
hand side.
Chapter 2
Distinguished features
Always to be best and distinguished above others.
Homer, Iliad, 6
14
CHAPTER 2.
DISTINGUISHED FEATURES
15
top conic
bottom conic
outline
crease
bitangent
inflection
ending
Figure 2.1: An outline with ending
conics.
Figure 2.2:
Some distinguished
points and the tangents through
these points.
The work described in this paper uses only an outline's distinguished features,
that is features of the outline that are viewpoint independent. These come in
two different categories. The first one are conics, and here mostly an object's
top and bottom conic
1
(see figure 2.1). The conics' advantage is that they
are comparatively easy identified. The conics' midpoint will be a viewpoint
independent point on the axis of symmetry for both the weak perspective
and the affine case, however, the concept of a midpoint is meaningless in the
projective case.
The second feature are so called (distinguished points) on the outline, whose
special relationship to a circle on the surface allows their identification both
in the image (where they are the projection of points on the circle) and on
the surface. Characteristic for all these distinguished points is that they are
distinguished by the way their tangent behaves (see figure 2.2). It is therefore
necessary to study the tangents first.
1
Top and bottom conics are not a generic feature for a surface of revolution. However,
most man made objects will end abruptly on at least the bottom side, generating a conic
when viewed from any other direction than fronto-parallel.
CHAPTER 2.
DISTINGUISHED FEATURES
16
2.1
Tangents
One of the key-properties used throughout this paper is the fact that a tan-
gent to the surface as well as the outline will always intersect the axis of
symmetry in exactly the same point, no matter from where the surface is
viewed.
2
This is explained below and closely modelled after [12].
2.1.1
The Tangent Cone
For rotationally symmetric surfaces is it possible to formulate one-parameter
systems of planes tangent to a circle along the surface. The envelope of these
tangent-planes is a right circular cone
3
(see figure 2.3).
The most important result this construction yields is that the apex of every
tangent cone lies on the axis of symmetry and that the intersection of a
plane tangent to a point on this circle with the axis of symmetry is therefore
viewpoint independent. This can be thought of as a map where each circle on
the surface is mapped to exactly one point on the axis of symmetry. However,
there is no unambiguous map from the axis to the surface, each point on the
axis might map onto no, one or many surface points.
The question is what happens to the surface and the tangent cone when
projected into an image?
2.1.2
The Outline
The outline of a surface in a general perspective projection is a curve in
the image given by the set of rays through the camera focal point that are
tangent to the surface. The points of tangency on the surface form a space
curve -- the contour generator; see figure 2.4.
An alternative definition of the contour generator is that the plane tangent
to the surface at this point passes through the focal point. A result is the
following lemma [12]:
Lemma: Except where the image outline cusps,
4
a plane tangent
2
As long as the viewpoint is outside the surface and the point on the outline is not
self-occluded.
3
The other possibility, a cylinder with circular cross section, is a cone with its apex
at infinity; projective geometry doesn't differentiate between points at infinity and more
accessible points.
4
Cusps are ignored in what follows.
CHAPTER 2.
DISTINGUISHED FEATURES
17
Figure 2.3: The envelope of all the planes tangent to the points along a circle
on the surface is a cone.
contour
generator
image plane
outline
object
focal point
Figure 2.4: A general projection.
Excerpt out of 90 pages
- Quote paper
- Sven Utcke (Author), 1993, Transfer and Invariants of Surfaces of Revolution, Munich, GRIN Verlag, https://www.grin.com/document/185569

Similar texts







Publish now - it's free
✕
Excerpt from
90
pages

Comments